FPV Egocentric Data Collection Made Easy! VDEgo-C2 & C4 Presale is LIVE

This product was successfully added to cart!
Ready-to-Use Robot Motion Datasets | Virdyn

Product Overview
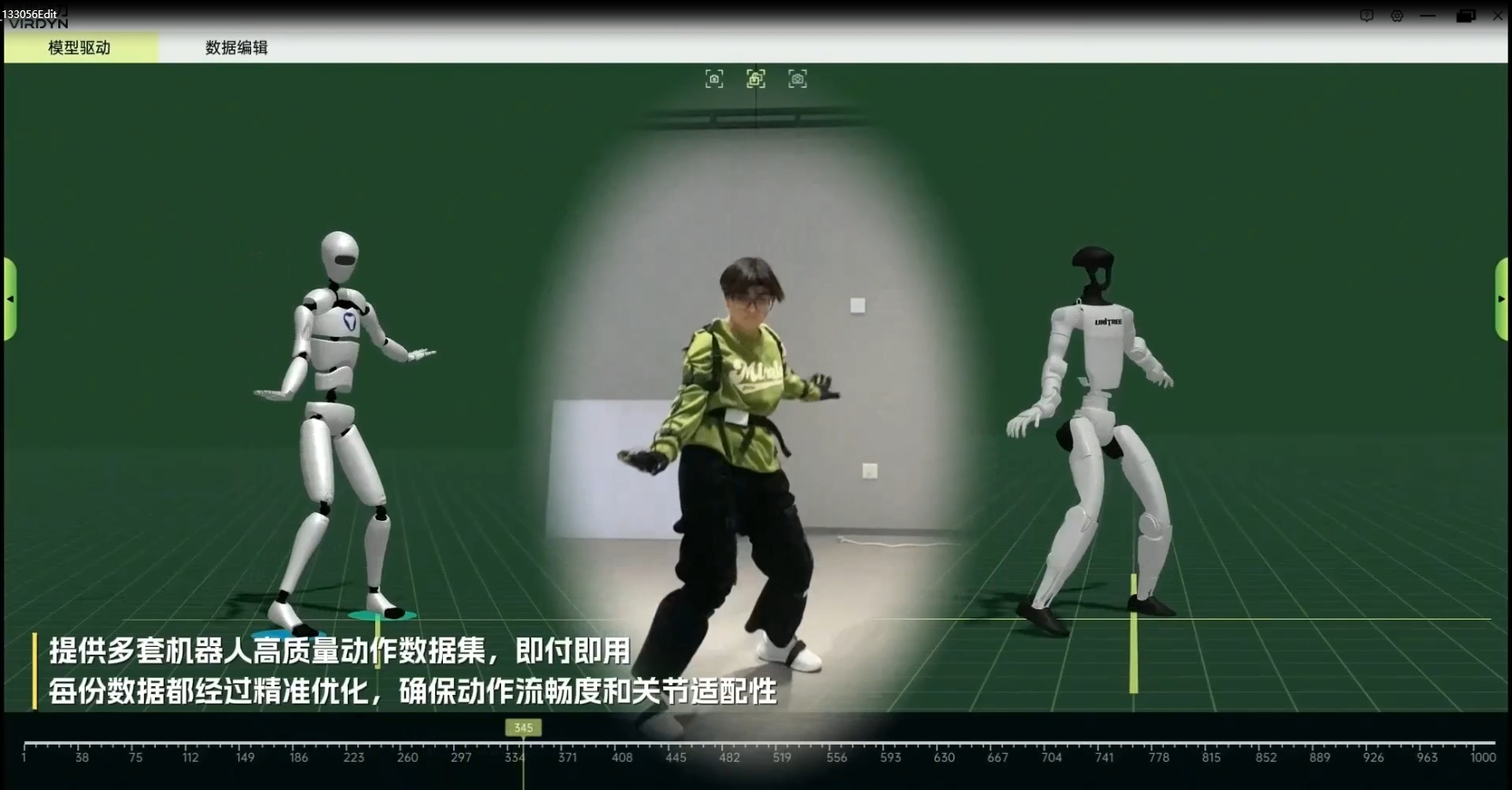
Virdyn Humanoid Robot Motion Datasets provide a comprehensive, production-ready library of over 135 high-fidelity motion sequences, engineered specifically for the Unitree G1 (29-DOF) humanoid robot. This dataset is crafted through a rigorous three-stage pipeline—combining high-precision inertial motion capture, professional retargeting algorithms, and meticulous manual correction—to ensure every movement is both natural and physically viable for the target platform. It undergoes stringent validation for positional/orientational stability, motion smoothness, and, critically, a 0% motor-angle over-limit rate, guaranteeing hardware safety. Stored in a plug-and-play CSV format adapted to the robot’s native coordinate system, it enables developers, researchers, and educators to bypass months of motion programming and debugging, accelerating deployment in applications from teleoperation and reinforcement learning to dynamic demonstrations.
Virdyn Humanoid Robot Motion Datasets - Core Information Overview
|
Module
|
Key Information
|
Description & Customer Value
|
|---|---|---|
|
1. Dataset Overview
|
Name: 140+ Humanoid Robot Motion Datasets
Compatible Model: Unitree G1 Humanoid Robot (29-DOF version) |
A high-quality, ready-to-use pre-programmed motion library specifically built for the Unitree G1 robot, containing over 140 motions.
|
|
2. Content & Categories
|
Number of Motions: > 140
Motion Categories: Divided into 6 major types: • Basic Motions (e.g., walking, turning) • Functional Actions (e.g., carrying, operating) • Dance Motions • Talent Motions (e.g., martial arts, gymnastics) • Holiday-Themed Motions • Humorous Motions |
Rich and diverse motions covering scenarios from basic control to advanced demonstrations, meeting various needs for R&D, demos, and entertainment.
|
|
3. Data Acquisition & Production
|
Capture Equipment: Virtual full-body inertial motion capture system and software.
Production Pipeline: A three-stage refinement process: 1. High-Precision MoCap Acquisition: Capture human performer motions. 2. Professional Retargeting Algorithm Conversion: Map motions to the robot model. 3. Manual Frame-by-Frame Correction & Verification: Resolve issues like joint anomalies, motion stuttering, etc. |
Motions originate from natural human movements, with dual assurance from professional algorithms and manual verification. This ensures motions are both fluid and natural and conform to the target robot's physical constraints, not simply algorithmically generated.
|
|
4. Core Technical Standards (Quality Assurance)
|
Positional Stability: After completing leg-related motions, robot position shows no significant drift (<0.1m).
Orientation Stability: After completing motions, robot direction shows no significant drift (<3°). Motion Smoothness: Motor rotation curves are smooth and non-repetitive; joint and waist motors show no jitter during motion or while stationary. Motion Safety: 0% over-limit rate for motor rotation angles, ensuring hardware safety. Frame Continuity: Motions are seamless, with motor change rates below safe thresholds. Motion Feasibility: Motions completely and accurately reproduce the intended human postures. |
Core promise of "Ready-to-Use, Safe & Reliable". All motions undergo strict validation and can be directly used for robot control, significantly reducing the difficulty and risk for developers in programming and debugging motions themselves, while ensuring hardware safety.
|
|
5. Data Specifications
|
Data Content: Per-frame robot joint position, posture, and motor rotation data.
Coordinate System: Adapted to the Unitree G1 robot base coordinate system (origin at chassis center, X-axis forward, Y-axis left, Z-axis up). Data Format: Plain-text CSV files, UTF-8 encoding, fields separated by tabs ( \t).File Structure: Stored in "Scene-Action Name" format for easy management. |
Standard, open data format. Can be directly imported into your control framework or simulation software for use without additional coordinate conversion—truly plug-and-play.
|
Core Value Proposition: This dataset provides you with a set of industrially produced and validated, ready-to-use high-quality robot motion solutions. It helps you quickly achieve robot functionality demonstrations, algorithm testing (e.g., reinforcement learning), or actual application deployment, saving months of motion programming and debugging time.
Robot Datasets Demo Performance
Specifications
The Dataset: A Comprehensive Foundation for Robot Behavior
Our dataset is engineered to provide a robust foundation for a wide range of applications, from basic mobility to complex human-robot interaction.
Core Specifications:
-
Total Motions: 140+ individual skill sequences
-
Target Platform: Optimized for Unitree G1 29-DOF kinematics
-
Format: Clean, timestamped CSV files with joint position trajectories
-
Validation: All motions tested for stability and feasibility in a dynamic simulator
Performance Demonstration
Virdyn Robot Partners

Buy NOW
Write your message here and send it to us
Products categories
-

Motion Capture Technology Opens a New Era of An...
-

Virtual Host Technology: Help Mainstream Media ...
-

Humanoid Robot Intelligent Voice Interaction De...
-

Virdyn Humanoid Robot Live Event Performance So...
-

The Application of Virtual IP on Cultural Touri...
-

Virdyn VDFace Pro Capture System for Real Time ...





