
This product was successfully added to cart!
Robot & Dexterous Hand Virtual Simulation Training Package

Bridge the Real-to-Sim Gap: From Human Motion to Robot Control in Minutes
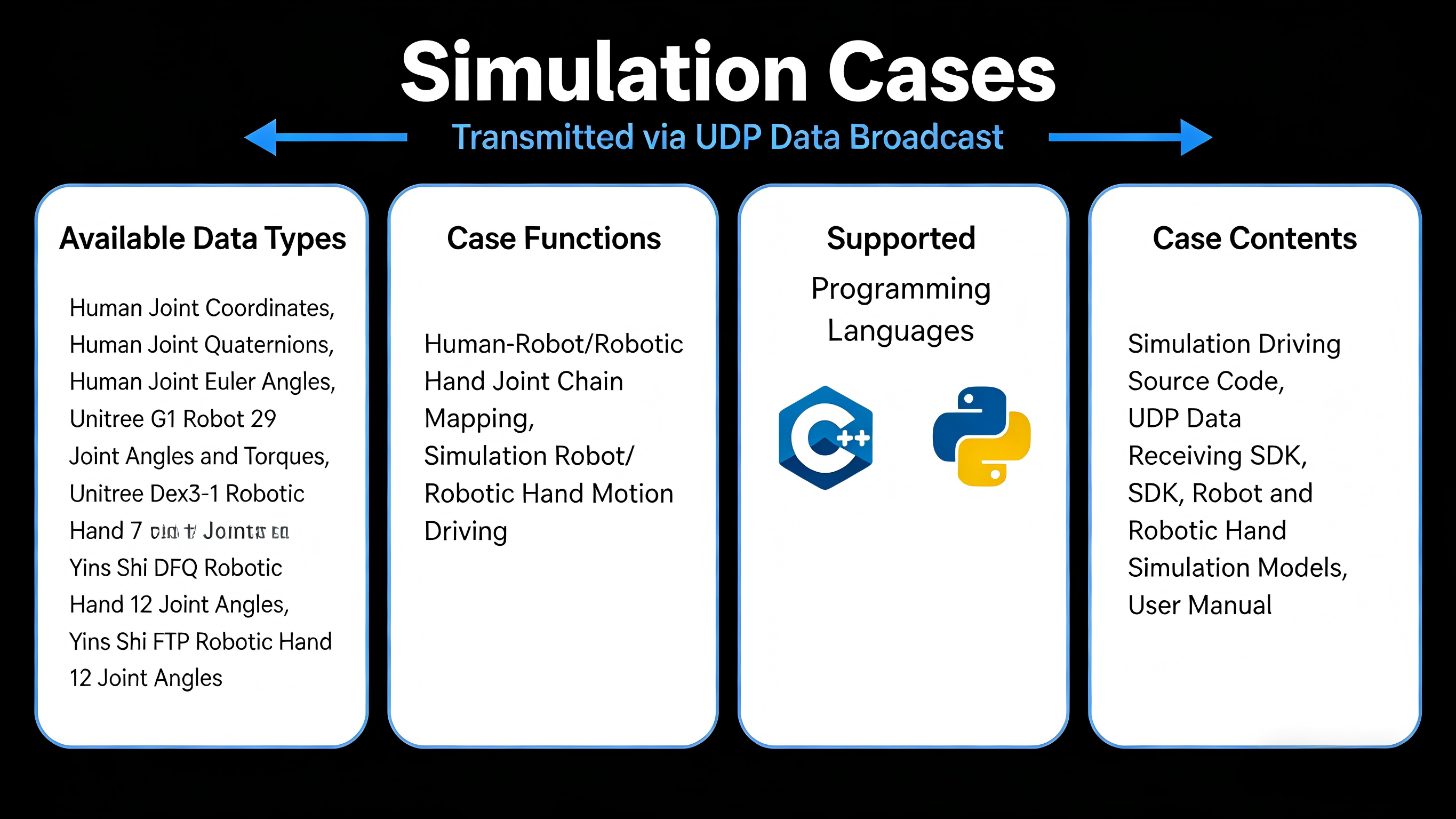
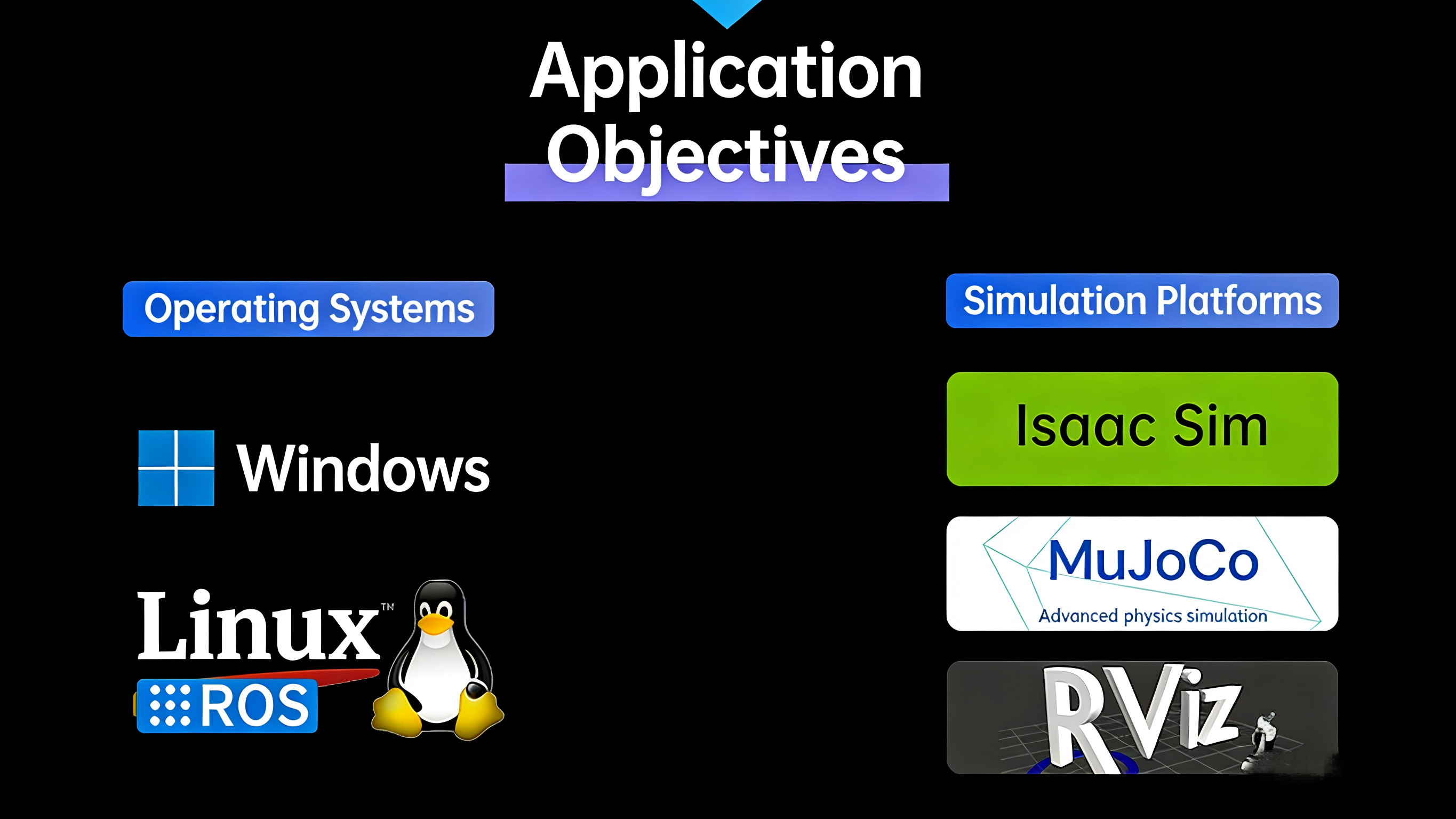
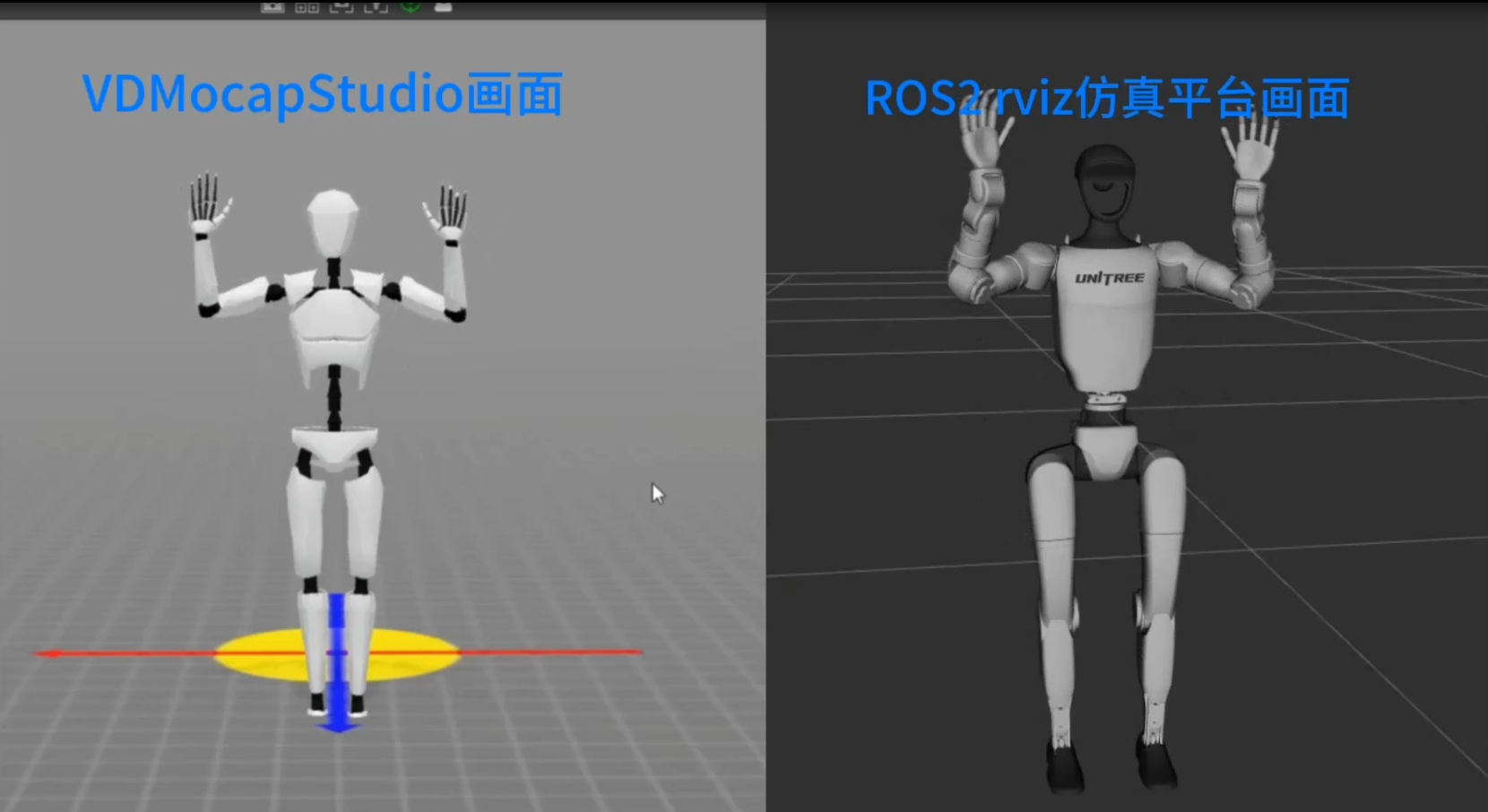
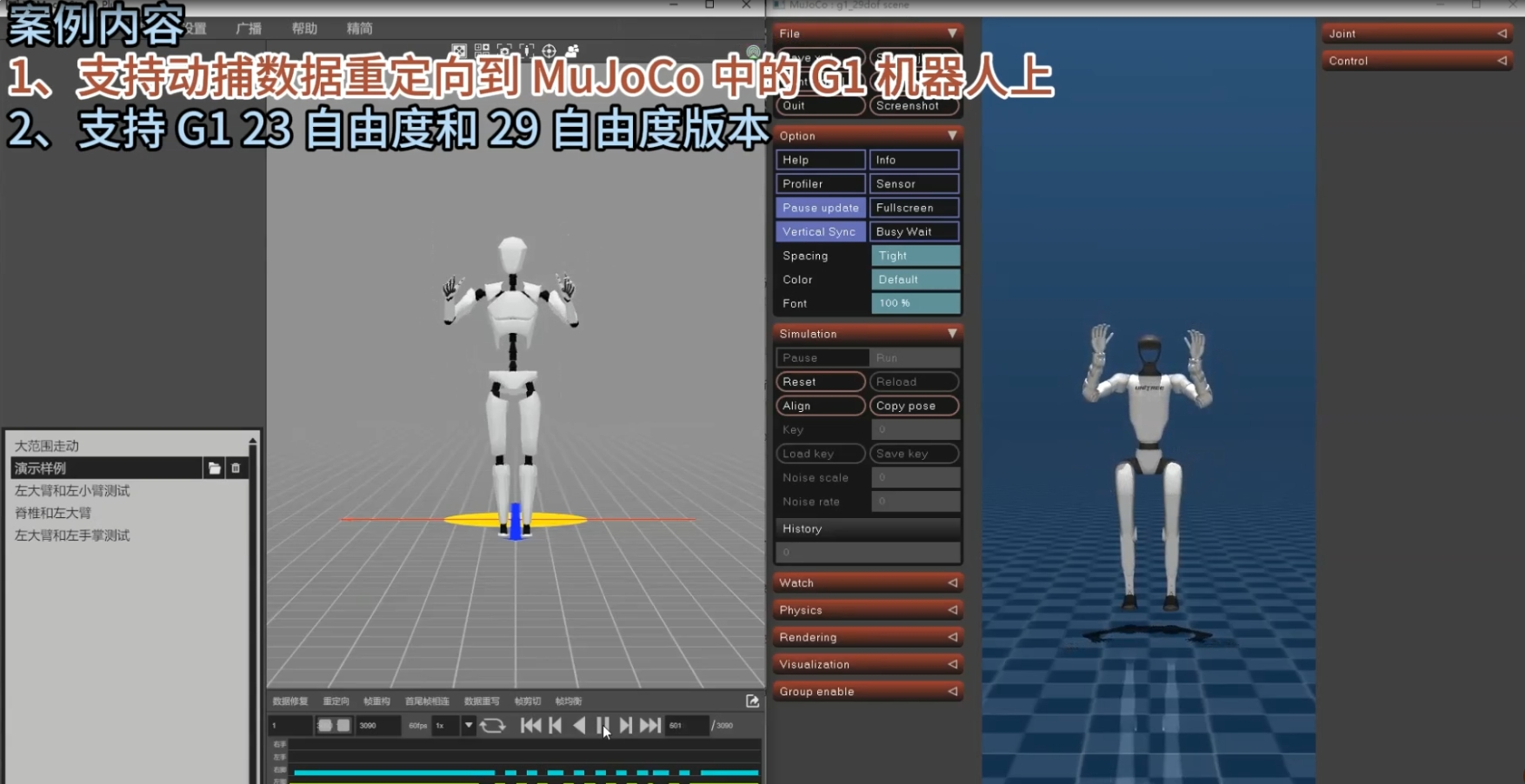
1. Supports redirecting full-body motion data to simulated robots or dexterous hands on MuJoCo, RViz, and Isaac Sim platforms, synchronously displaying the model redirection effect.
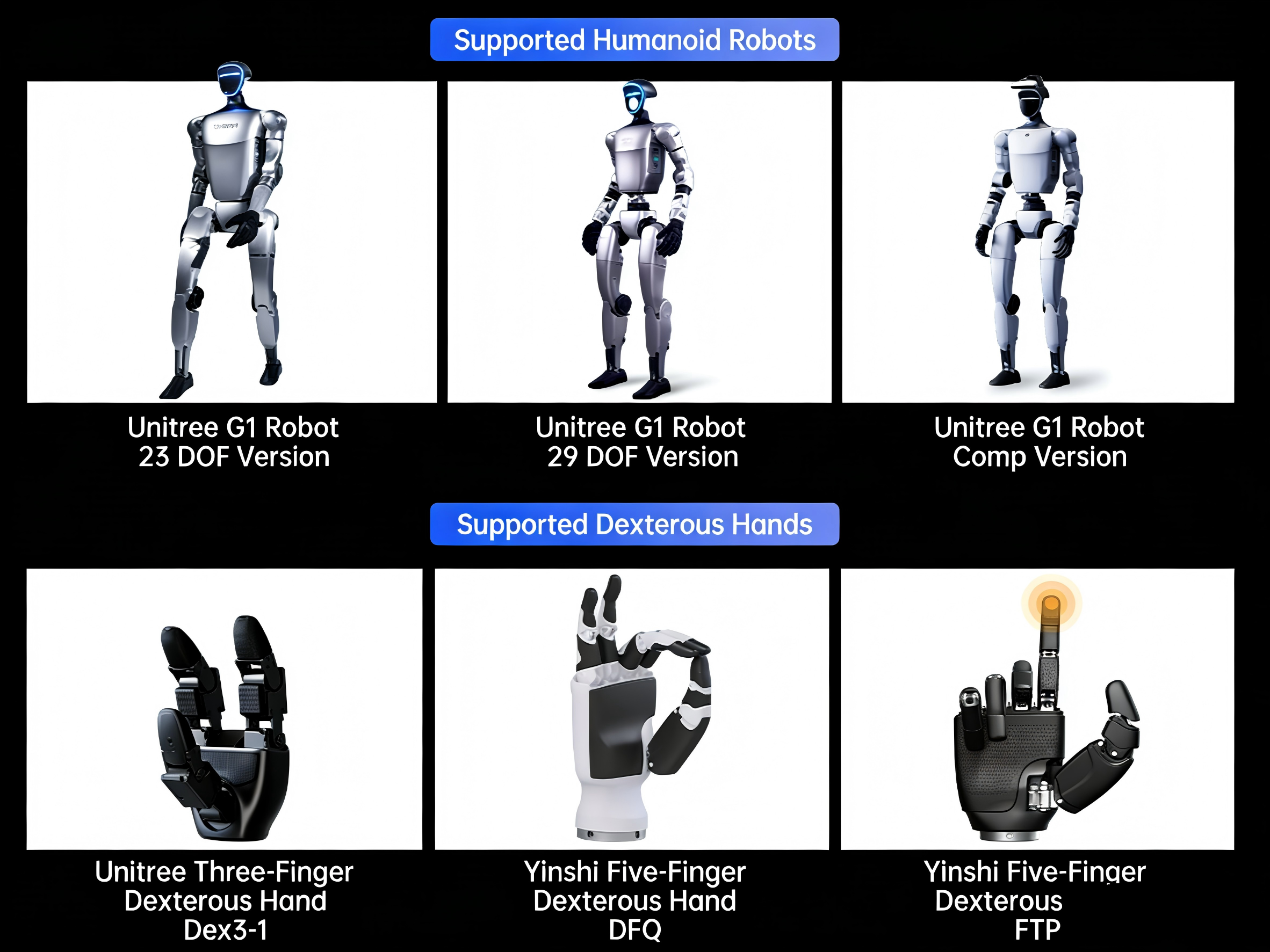
2. Supports redirection to the Unitree G1 robot, including 23-DOF, 29-DOF, and Comp versions, supporting angle-driven or torque-driven operation.
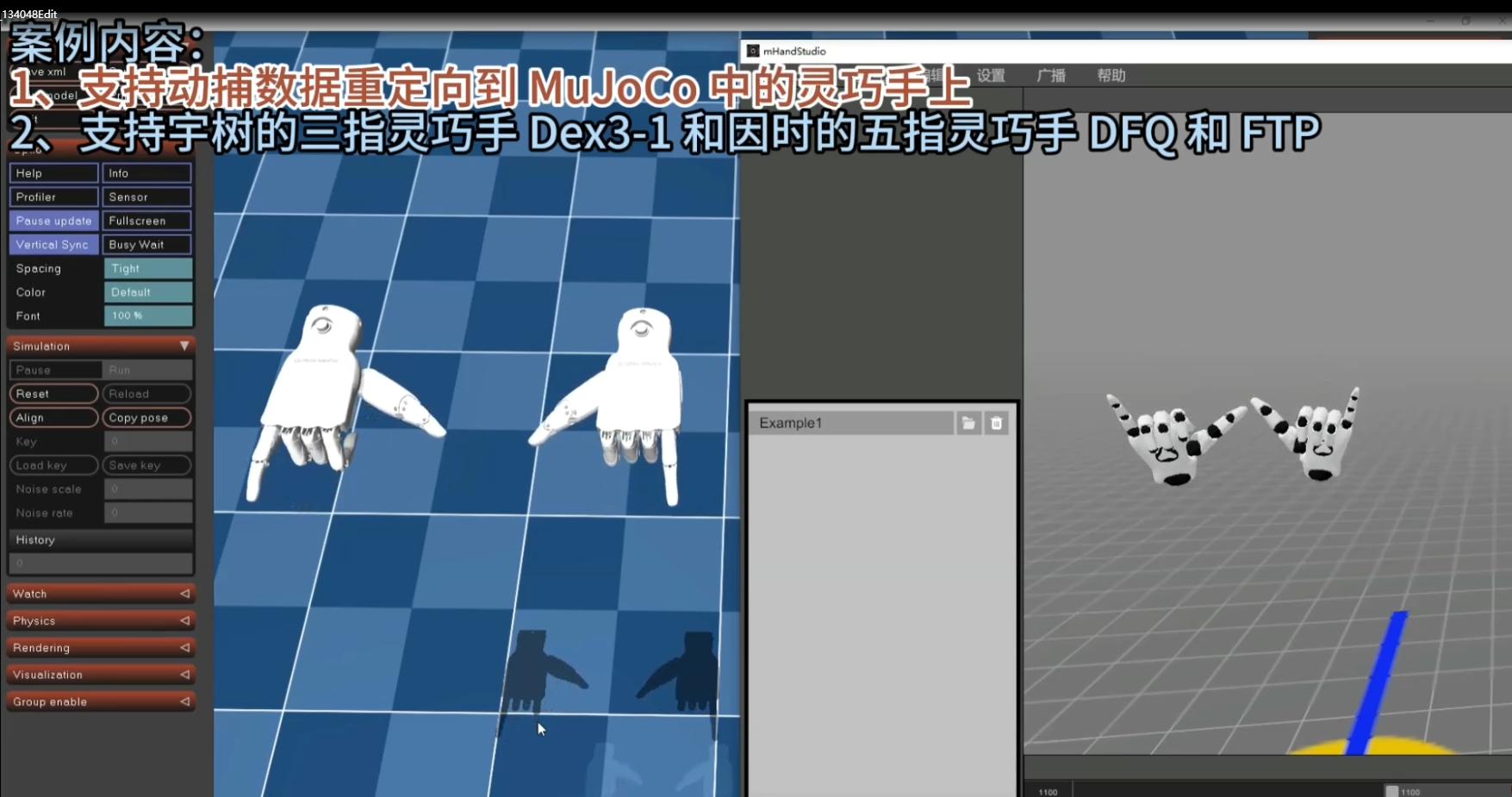
3. Supports redirection to the Unitree three-finger dexterous hand Dex3-1, the Time-Based five-finger dexterous hand DFQ, and FTP, supporting angle-driven operation.
4. Provides simulation driver source code, UDP data reception SDK, robot and dexterous hand simulation model files, and user manuals.
Bridge the Real-to-Sim Gap: From Human Motion to Robot Control in Minutes
The Complete Simulation Starter Kit for Robotics
This package is more than just models—it's a production-ready integration framework designed to accelerate your research and development cycle.
|
Package Component |
Description |
Your Benefit |
|
Pre-Configured Robot & Hand Models |
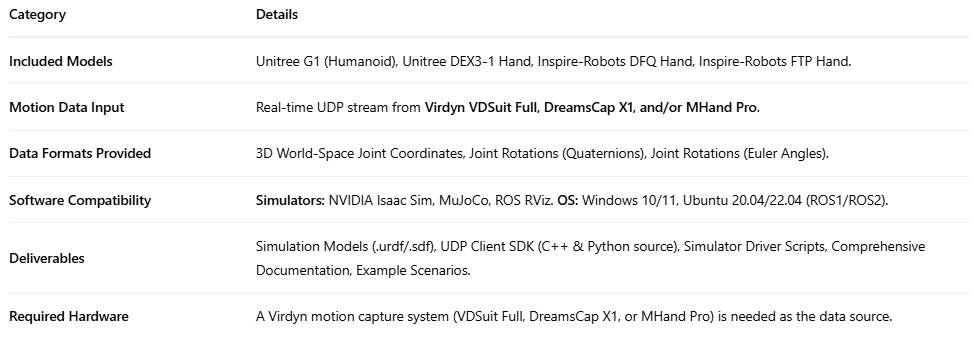
High-fidelity URDF/SDF models for Unitree G1, Unitree DEX3-1, Inspire-Robots DFQ & FTP hands. |
Eliminate days of modeling and debugging. Import and simulate instantly. |
|
UDP Data Bridge & SDK |
Robust C++/Python SDK to receive real-time motion data broadcast via UDP from Virdyn hardware. |
Establish a low-latency, reliable data link between capture and sim in minutes. |
|
Simulation Driver Plugins |
Ready-to-use plugins/scripts for Isaac Sim, MuJoCo, and RViz to drive the simulated robots with live or recorded data. |
Skip writing custom sim interfaces. Focus on control algorithms and training. |
|
Comprehensive Data Output |
Live stream includes 3D joint positions, quaternions, and Euler angles for full biomechanical fidelity. |
Gain maximum flexibility for different control inputs and learning methods. |
| Full Documentation & Examples | Step-by-step guides covering setup, calibration, data mapping, and example training scenarios. | Reduce learning curve and onboarding time for your entire team. |
Seamless Hardware & Software Ecosystem
-
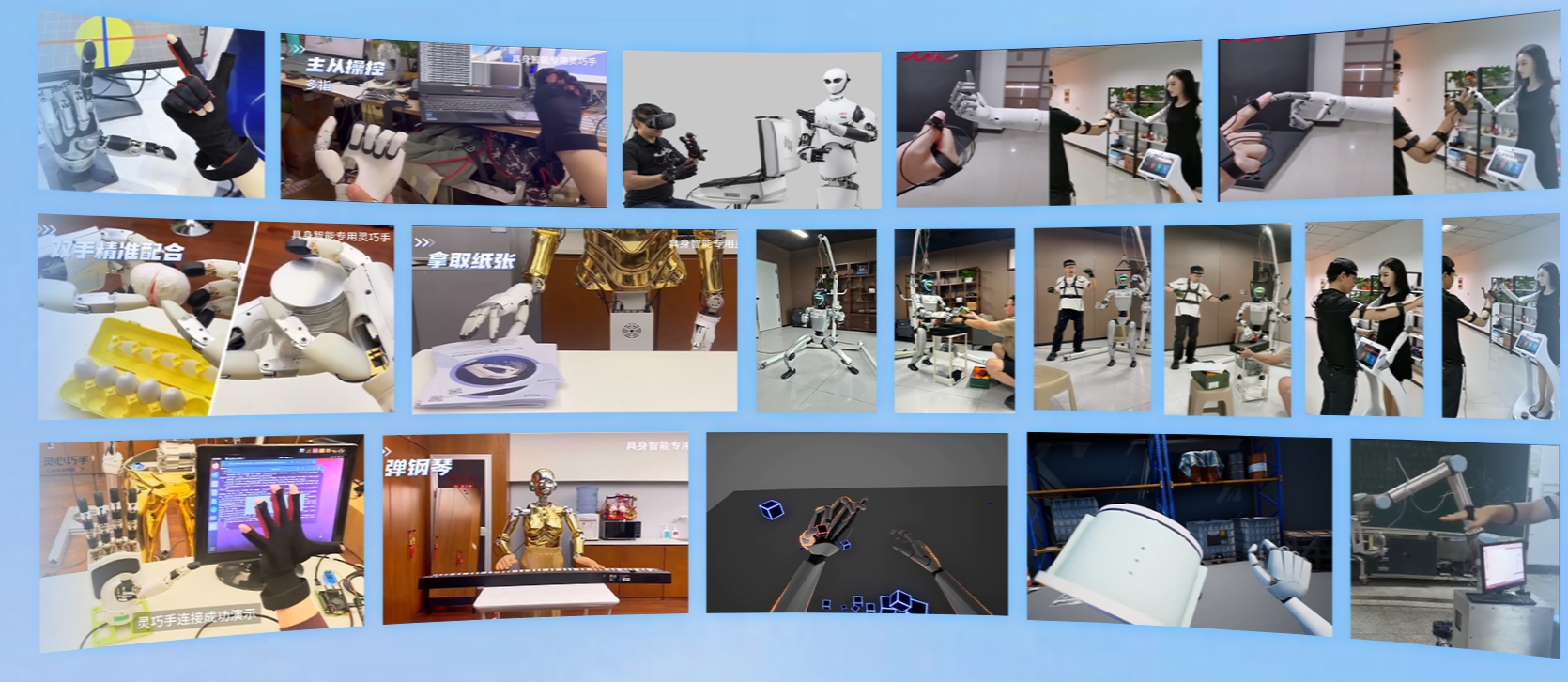
Full Hardware Compatibility: Works seamlessly with VDSuit Full (body), DreamsCap X1 (upper body/head), and MHand Pro (hands) for capturing complete human performance.
-
Universal Data Transport: Motion data is broadcast via UDP on your local network—a simple, standard, and firewall-friendly protocol for real-time streaming.
-
Cross-Platform Support: The provided SDKs and scripts support both Windows and Linux (ROS1/ROS2) environments.
-
Leading Simulator Ready: Out-of-the-box support for NVIDIA Isaac Sim (for high-fidelity RL training), MuJoCo (for fast physics simulation), and RViz (for visualization in ROS).
Core Applications: What Can You Build?
-
Imitation Learning Pipelines: Record expert human demonstrations with our suits and directly train robot policies in simulation.
-
Controller Prototyping & Stress Testing: Test new walking or grasping controllers against diverse human motion data before deploying on costly hardware.
-
Human-Robot Interaction (HRI) Studies: Simulate safe and natural interaction scenarios using realistic human motion proxies.
-
Digital Twin Development: Create a real-time synchronized digital twin of a human operator controlling a remote robot or avatar.

Technical Specifications & Requirements
Performance Demonstration

Virdyn Robot Partners

Buy NOW
Products categories
-

VDMocco Half-Body Mocap System | Robot Data Col...
-

Motion Capture Technology Opens a New Era of An...
-

Ready-to-Use Robot Motion Datasets | Virdyn
-
Virdyn VDFace Capture System for Real Time Faci...
-

Virtual Host Technology: Help Mainstream Media ...
-

Full Body Motion Capture Accessories for Suit E...





