
이 제품이 장바구니에 성공적으로 추가되었습니다!
로봇 및 손재주 가상 시뮬레이션 교육 패키지

실제와 심의 격차 해소: 인간의 움직임부터 로봇 제어까지 단 몇 분 만에 완료
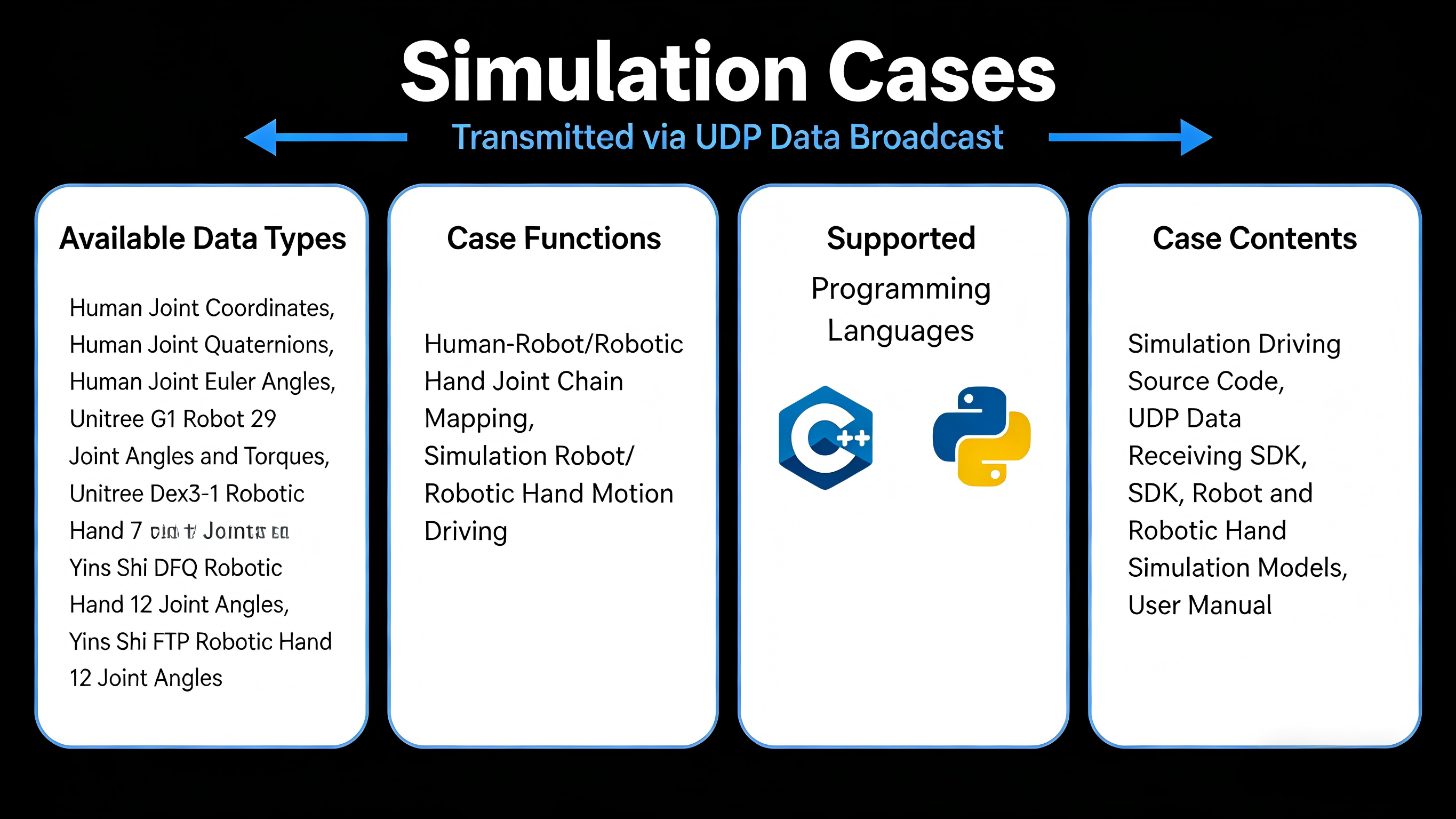
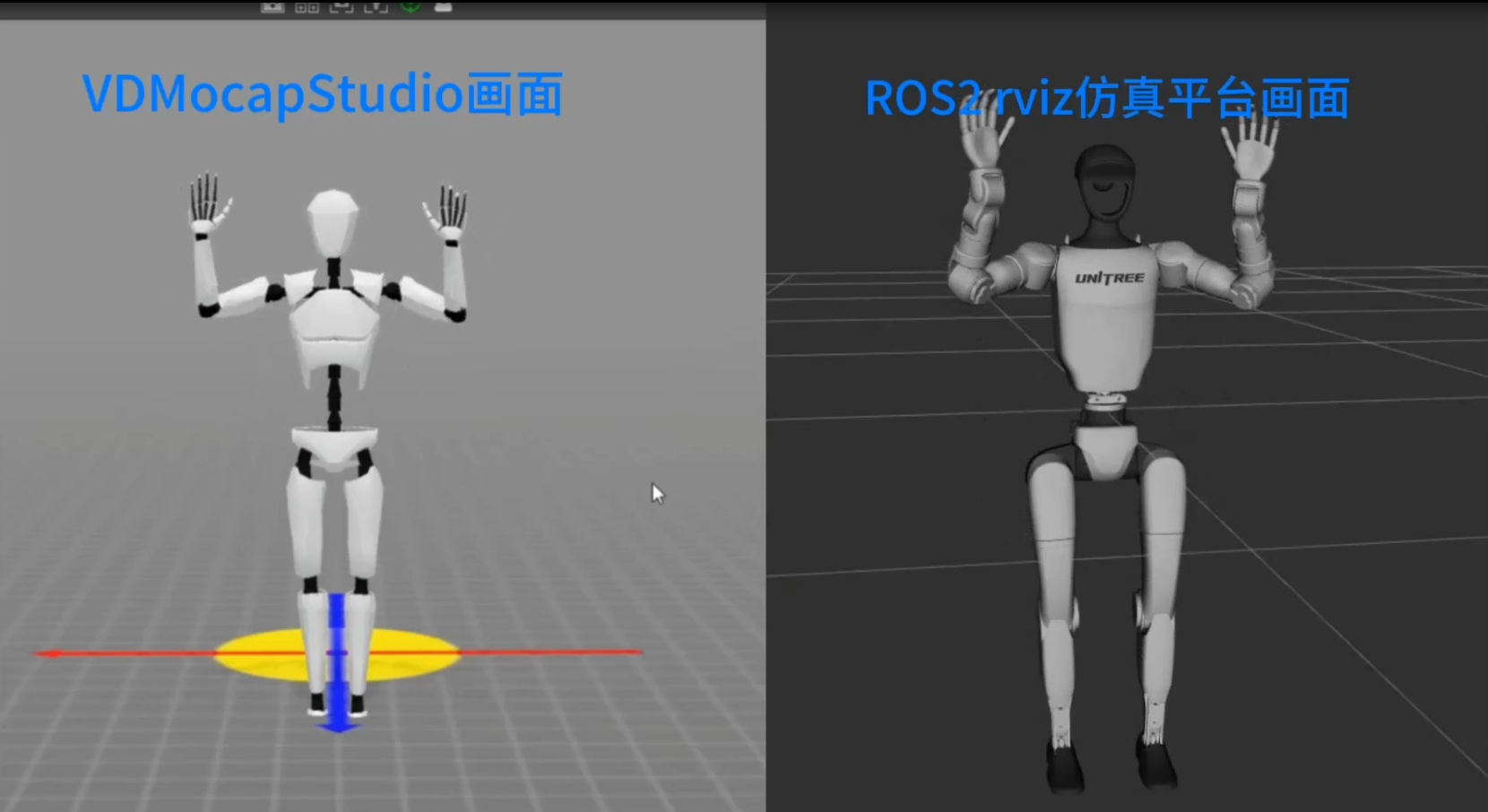
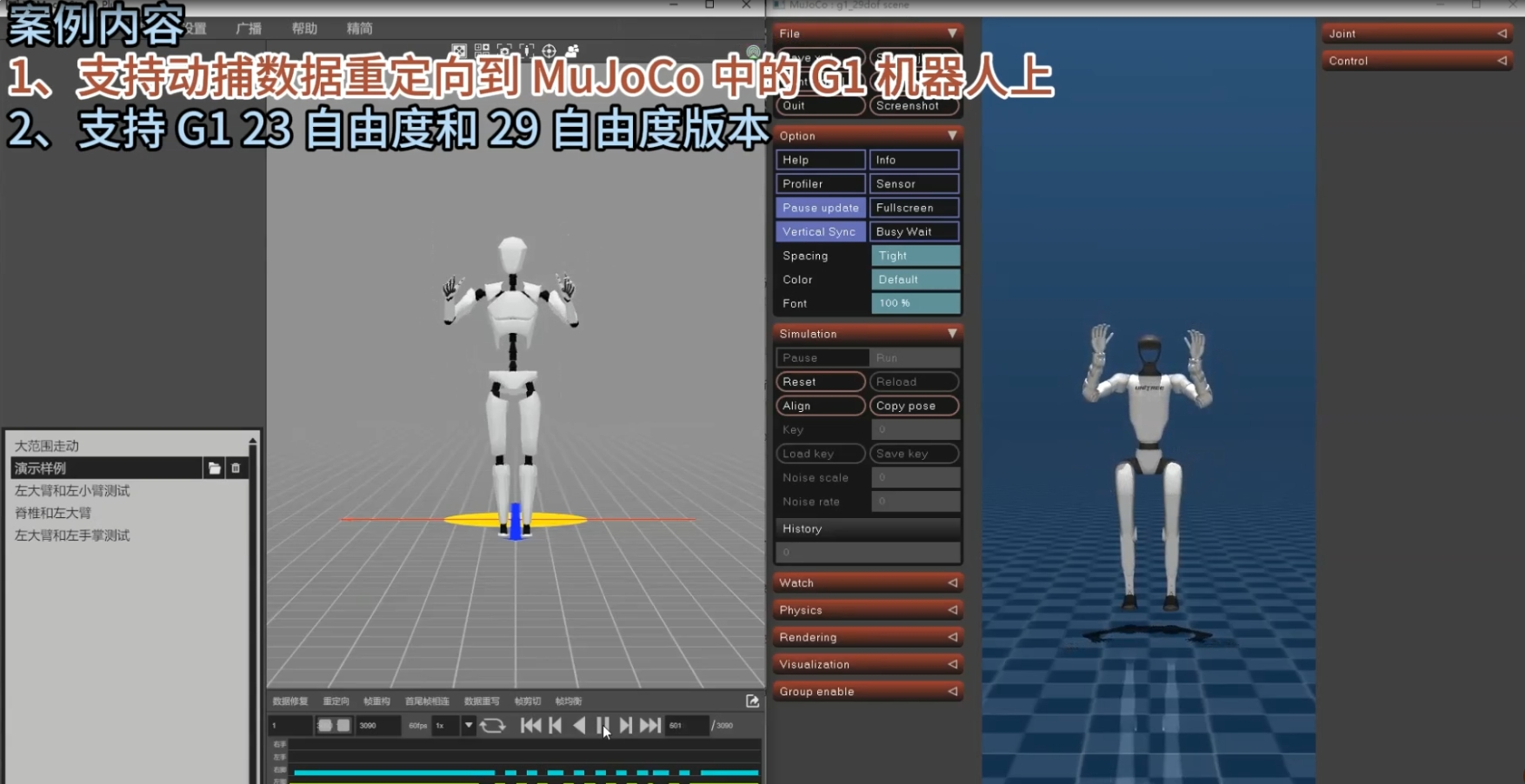
1. MuJoCo, RViz 및 Isaac Sim 플랫폼에서 시뮬레이션된 로봇이나 능숙한 손으로 전신 모션 데이터를 리디렉션하여 모델 리디렉션 효과를 동기적으로 표시하도록 지원합니다.
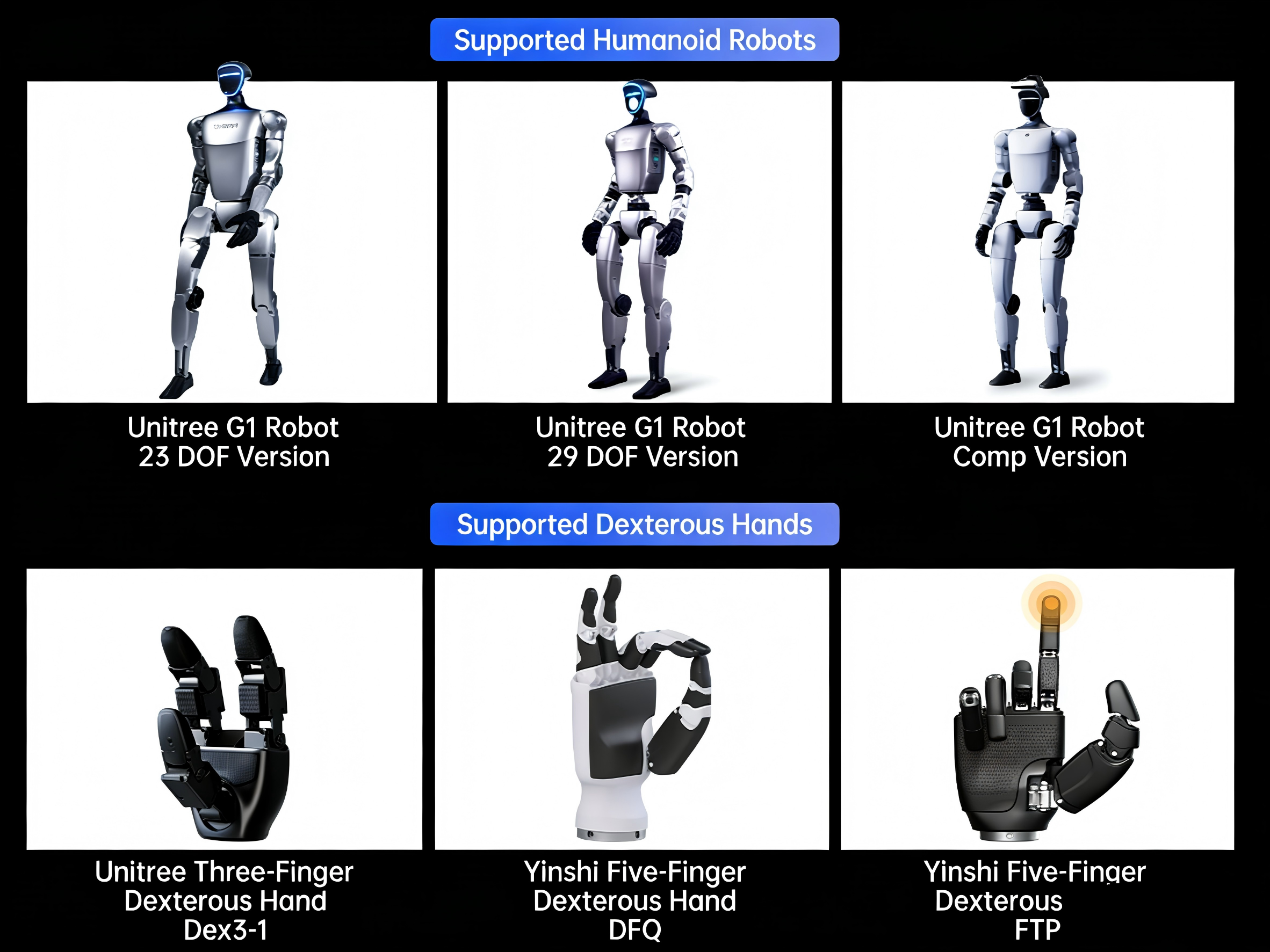
2. 각도 구동 또는 토크 구동 작동을 지원하는 23-DOF, 29-DOF 및 Comp 버전을 포함하여 Unitree G1 로봇으로의 리디렉션을 지원합니다.
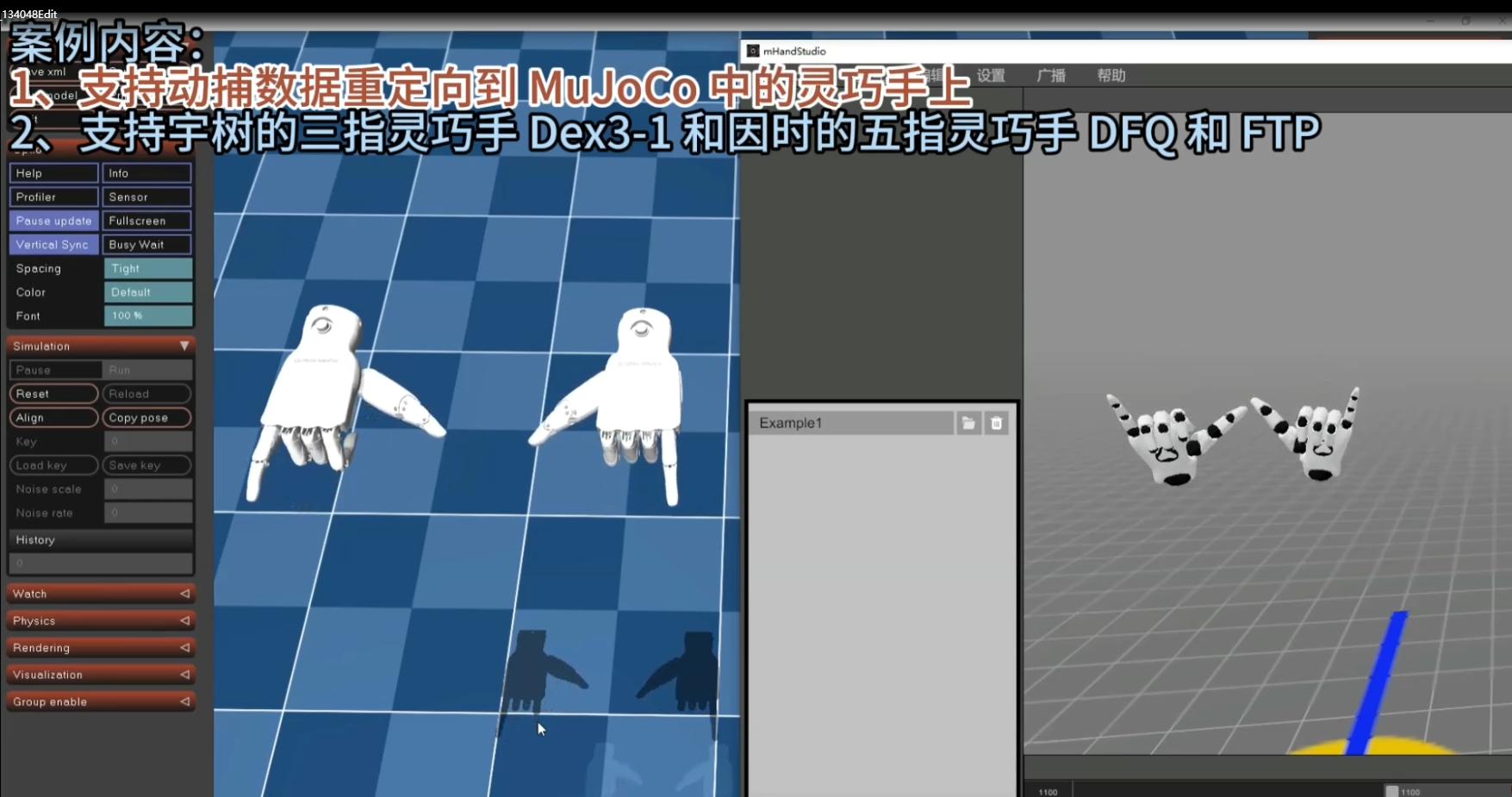
3. Unitree 세 손가락 능숙한 손 Dex3-1, 시간 기반 다섯 손가락 능숙한 손 DFQ 및 FTP로의 리디렉션을 지원하여 각도 기반 작업을 지원합니다.
4. 시뮬레이션 드라이버 소스코드, UDP 데이터 수신 SDK, 로봇 및 손재주 시뮬레이션 모델 파일, 사용자 매뉴얼을 제공합니다.
실제와 심의 격차 해소: 인간의 움직임부터 로봇 제어까지 단 몇 분 만에 완료
로봇공학을 위한 완벽한 시뮬레이션 스타터 키트
이 패키지는 단순한 모델 그 이상입니다. 연구 및 개발 주기를 가속화하도록 설계된 생산 준비 통합 프레임워크입니다.
|
패키지 구성요소 |
설명 |
귀하의 혜택 |
|
사전 구성된 로봇 및 손 모델 |
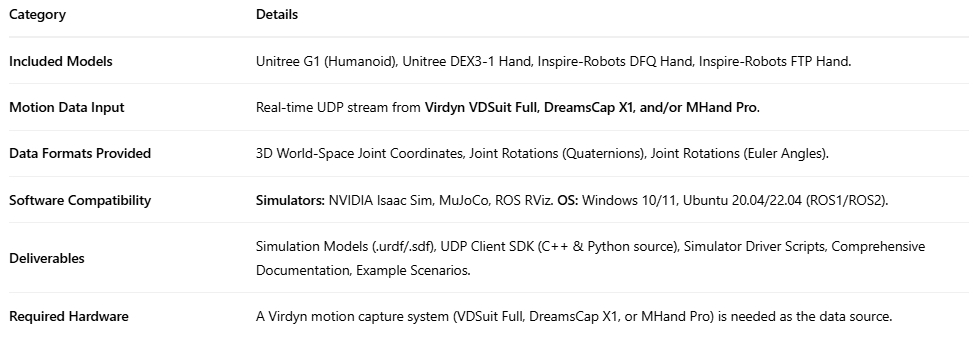
다음을 위한 고충실도 URDF/SDF 모델유니트리 G1,유니트리 DEX3-1,인스파이어-로봇 DFQ & FTP 손. |
모델링 및 디버깅에 소요되는 수일을 없앱니다. 즉시 가져오고 시뮬레이션하세요. |
|
UDP 데이터 브릿지 및 SDK |
Virdyn 하드웨어에서 UDP를 통해 실시간 모션 데이터 브로드캐스트를 수신하는 강력한 C++/Python SDK입니다. |
몇 분 만에 캡처와 시뮬레이션 사이에 지연 시간이 낮고 안정적인 데이터 링크를 구축할 수 있습니다. |
|
시뮬레이션 드라이버 플러그인 |
즉시 사용 가능한 플러그인/스크립트아이작 심,무조코및 RViz 실시간 또는 기록된 데이터를 사용하여 시뮬레이션된 로봇을 구동합니다. |
사용자 정의 SIM 인터페이스 작성을 건너뛰세요. 제어 알고리즘과 교육에 중점을 둡니다. |
|
종합적인 데이터 출력 |
실시간 스트림에는 다음이 포함됩니다.3D 관절 위치, 쿼터니언 및 오일러 각도 완전한 생체역학적 충실도를 위해. |
다양한 제어 입력 및 학습 방법에 대한 유연성을 극대화하십시오. |
| 전체 문서 및 예제 | 설정, 보정, 데이터 매핑 및 예제 교육 시나리오를 다루는 단계별 가이드입니다. | 전체 팀의 학습 곡선과 온보딩 시간을 단축하세요. |
원활한 하드웨어 및 소프트웨어 생태계
-
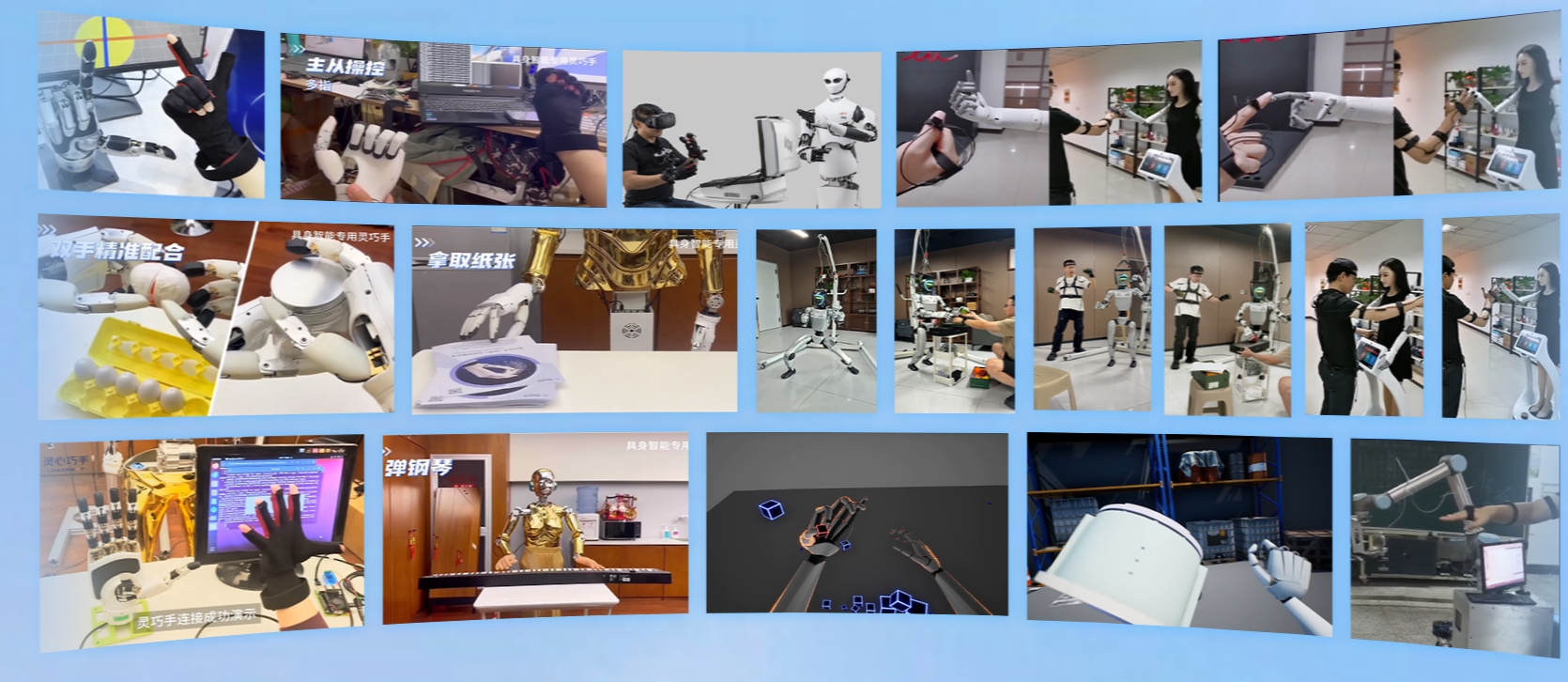
완전한 하드웨어 호환성: 다음과 원활하게 작동합니다.VDSuit 전체 (본체),드림스캡 X1 (상체/머리) 및M핸드 프로 (손) 완전한 인간의 연기를 포착하기 위한 것.
-
범용 데이터 전송: 모션 데이터는 다음을 통해 방송됩니다.UDP 로컬 네트워크에서 실시간 스트리밍을 위한 간단하고 표준이며 방화벽 친화적인 프로토콜입니다.
-
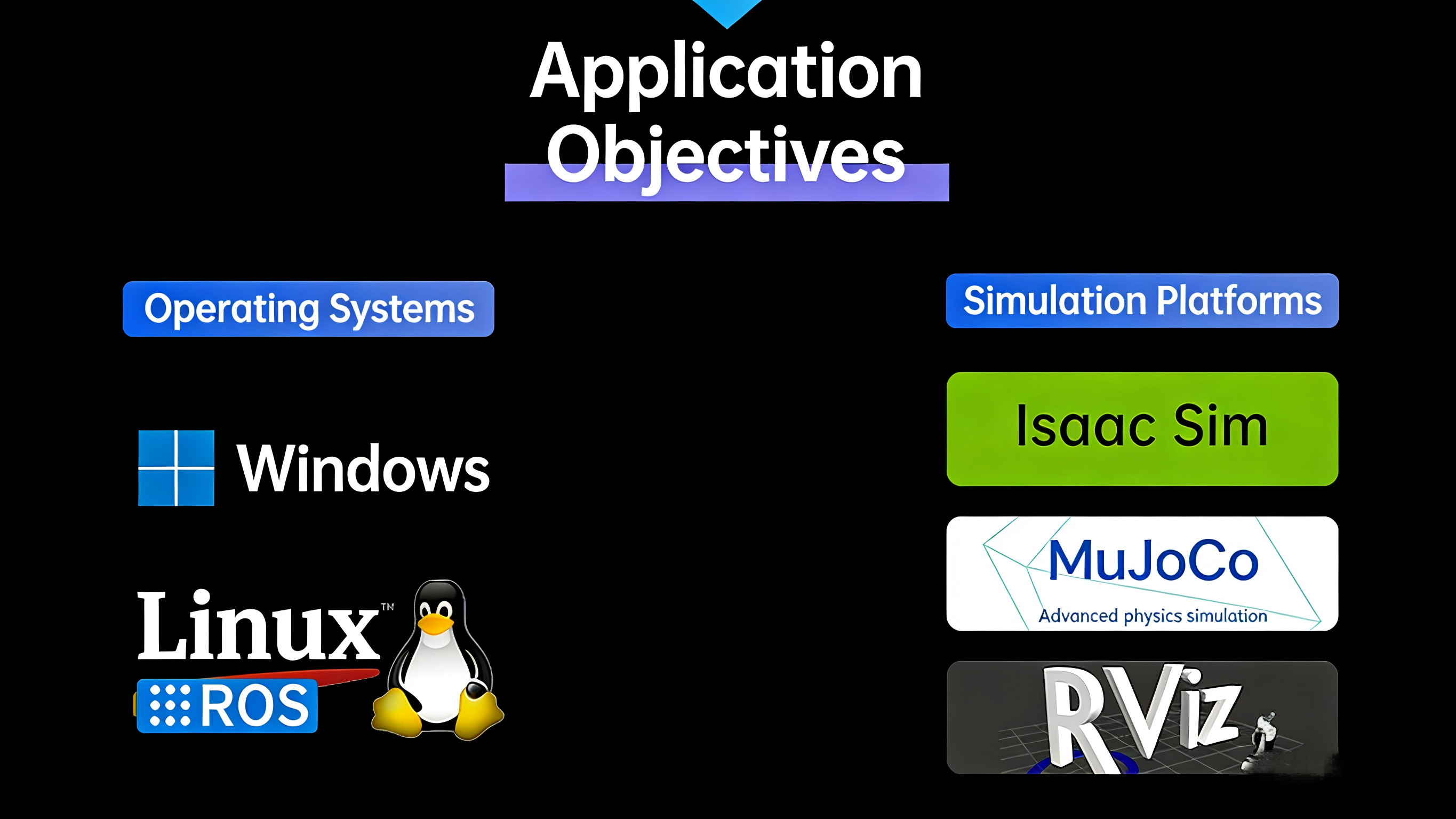
크로스 플랫폼 지원: 제공된 SDK와 스크립트는 두 가지를 모두 지원합니다.윈도우 및 리눅스(ROS1/ROS2) 환경.
-
최고의 시뮬레이터 준비: 즉시 사용 가능한 지원엔비디아 아이작 심 (고충실도 RL 훈련용),무조코(빠른 물리 시뮬레이션용) 및RViz (ROS 시각화용).
핵심 애플리케이션: 무엇을 구축할 수 있나요?
-
모방 학습 파이프라인: 우리 슈트를 입고 전문가의 인간 시연을 기록하고 시뮬레이션에서 로봇 정책을 직접 훈련하세요.
-
컨트롤러 프로토타이핑 및 스트레스 테스트: 값비싼 하드웨어에 배포하기 전에 다양한 인간 동작 데이터를 기준으로 새로운 걷기 또는 잡기 컨트롤러를 테스트해 보세요.
-
인간-로봇 상호작용(HRI) 연구: 사실적인 인간 모션 프록시를 사용하여 안전하고 자연스러운 상호 작용 시나리오를 시뮬레이션합니다.
-
디지털 트윈 개발: 원격 로봇이나 아바타를 제어하는 인간 조작자의 실시간 동기화 디지털 트윈을 생성합니다.

기술 사양 및 요구 사항
성능 시연

Virdyn 로봇 파트너

지금 구매





