
This product was successfully added to cart!
Robot & Dexterous Hand Virtual Simulation Training Package

Bridge the Real-to-Sim Gap: From Human Motion to Robot Control in Minutes
Bridge the Real-to-Sim Gap: From Human Motion to Robot Control in Minutes
The Complete Simulation Starter Kit for Robotics
This package is more than just models—it's a production-ready integration framework designed to accelerate your research and development cycle.
|
Package Component |
Description |
Your Benefit |
|
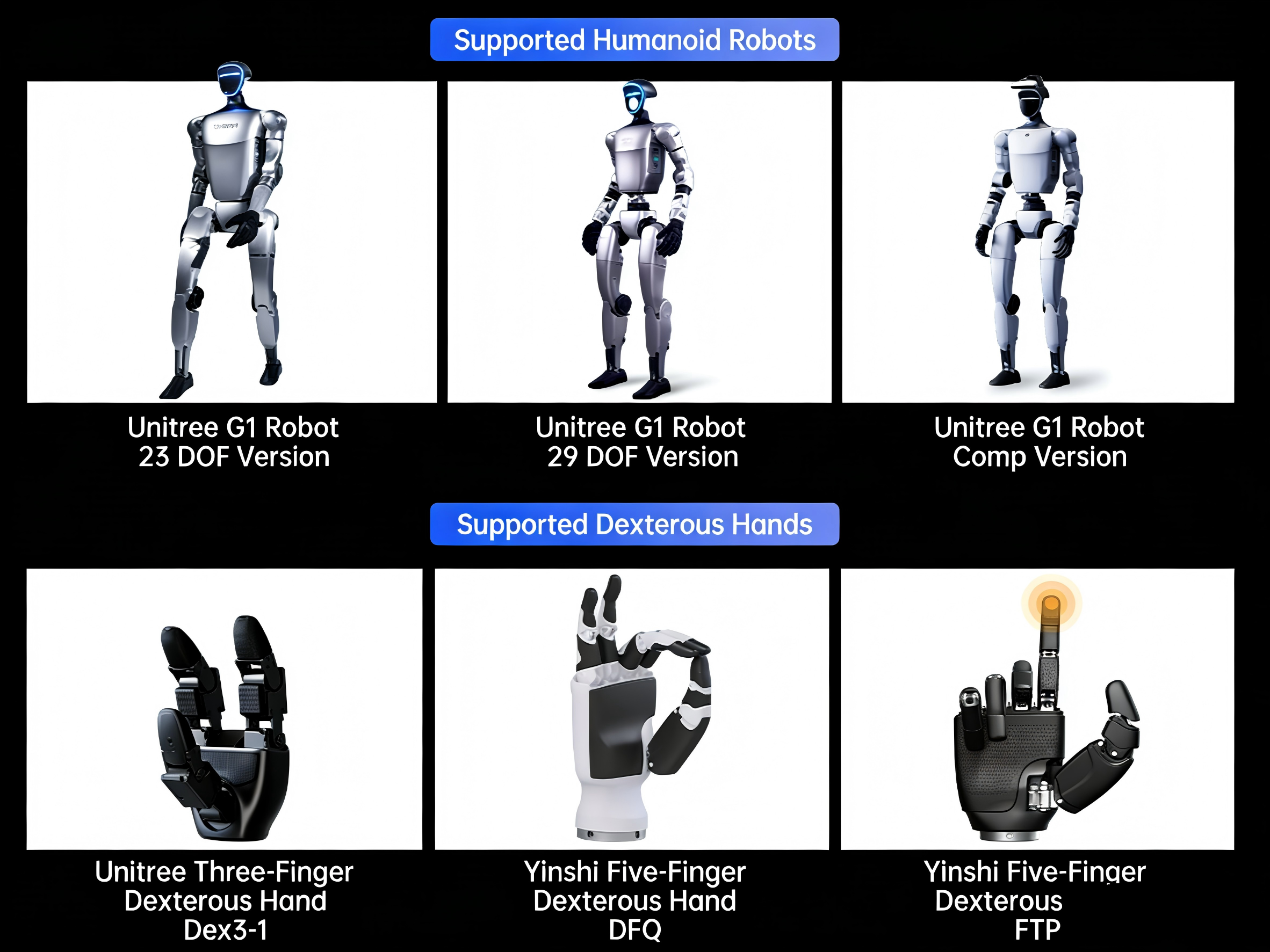
Pre-Configured Robot & Hand Models |
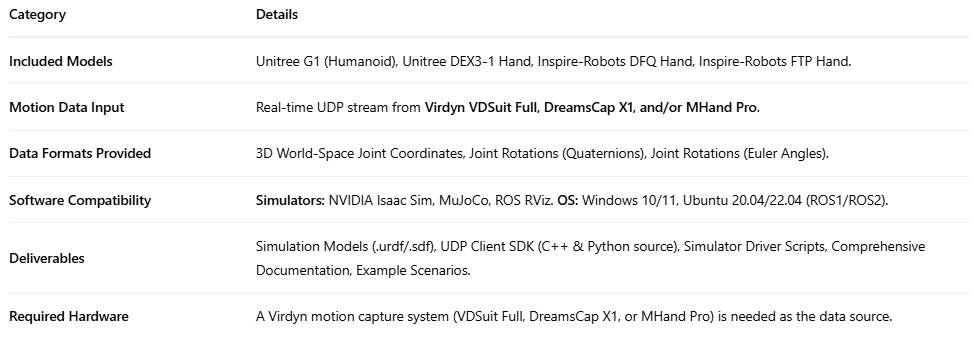
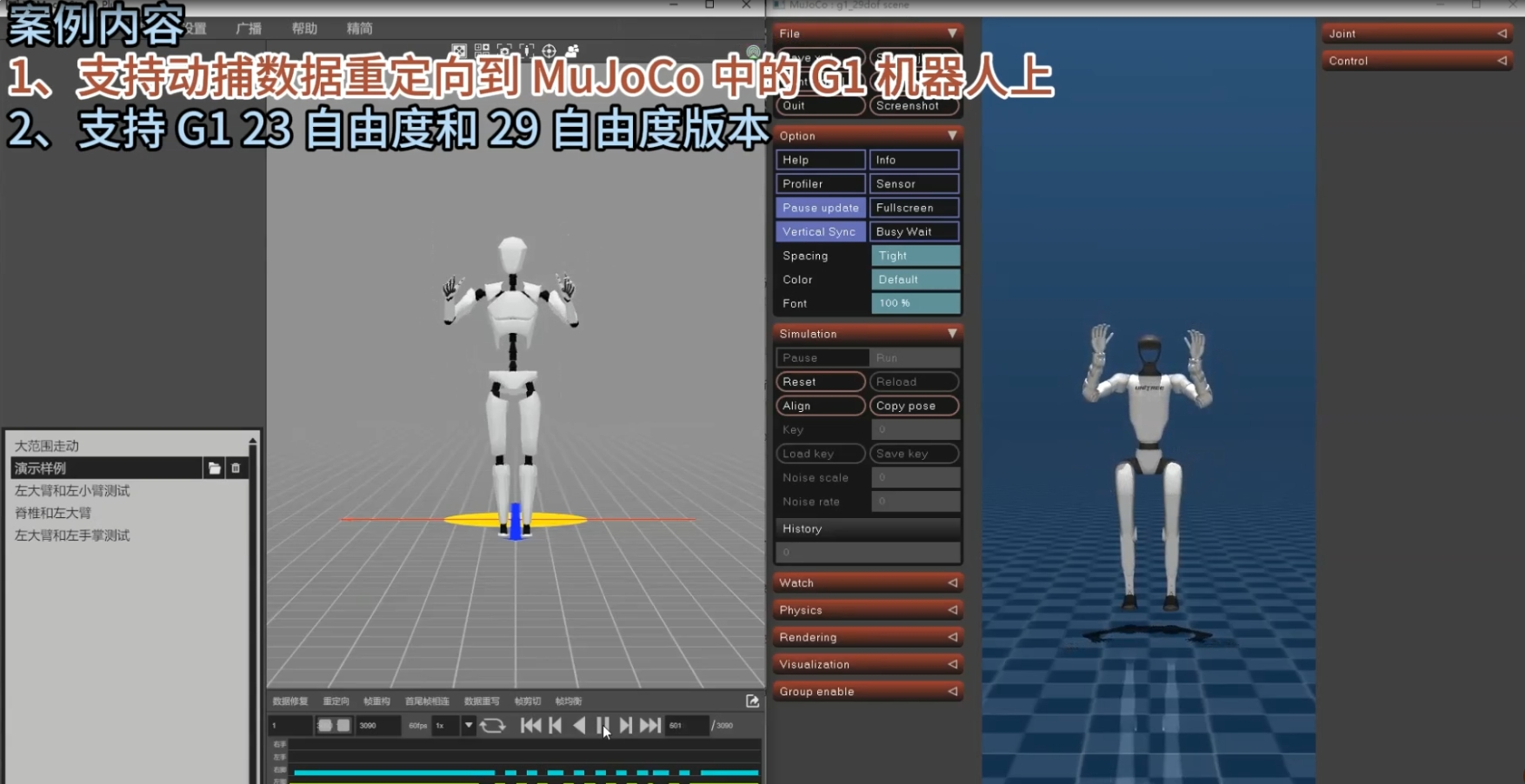
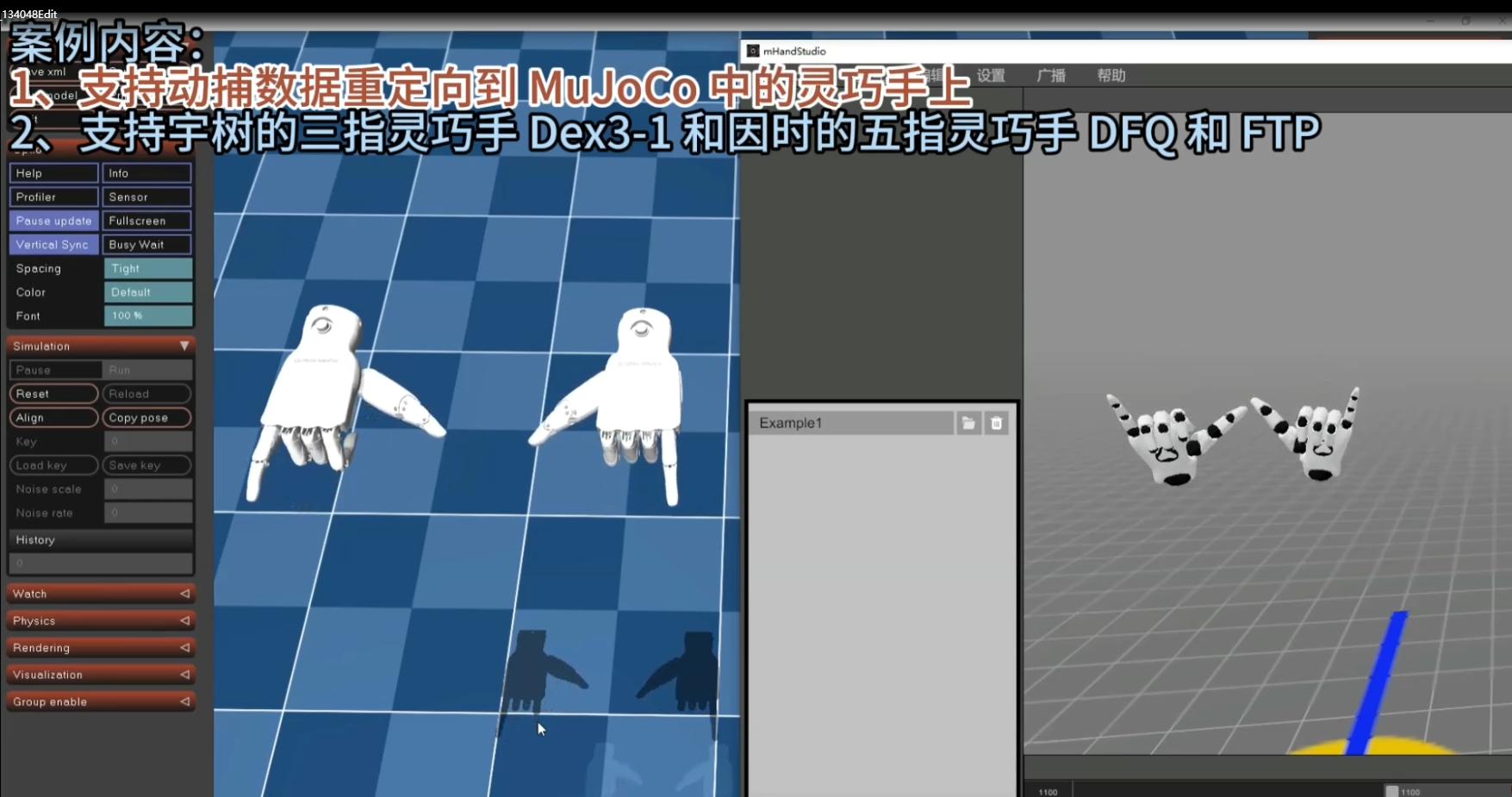
High-fidelity URDF/SDF models for Unitree G1, Unitree DEX3-1, Inspire-Robots DFQ & FTP hands. |
Eliminate days of modeling and debugging. Import and simulate instantly. |
|
UDP Data Bridge & SDK |
Robust C++/Python SDK to receive real-time motion data broadcast via UDP from Virdyn hardware. |
Establish a low-latency, reliable data link between capture and sim in minutes. |
|
Simulation Driver Plugins |
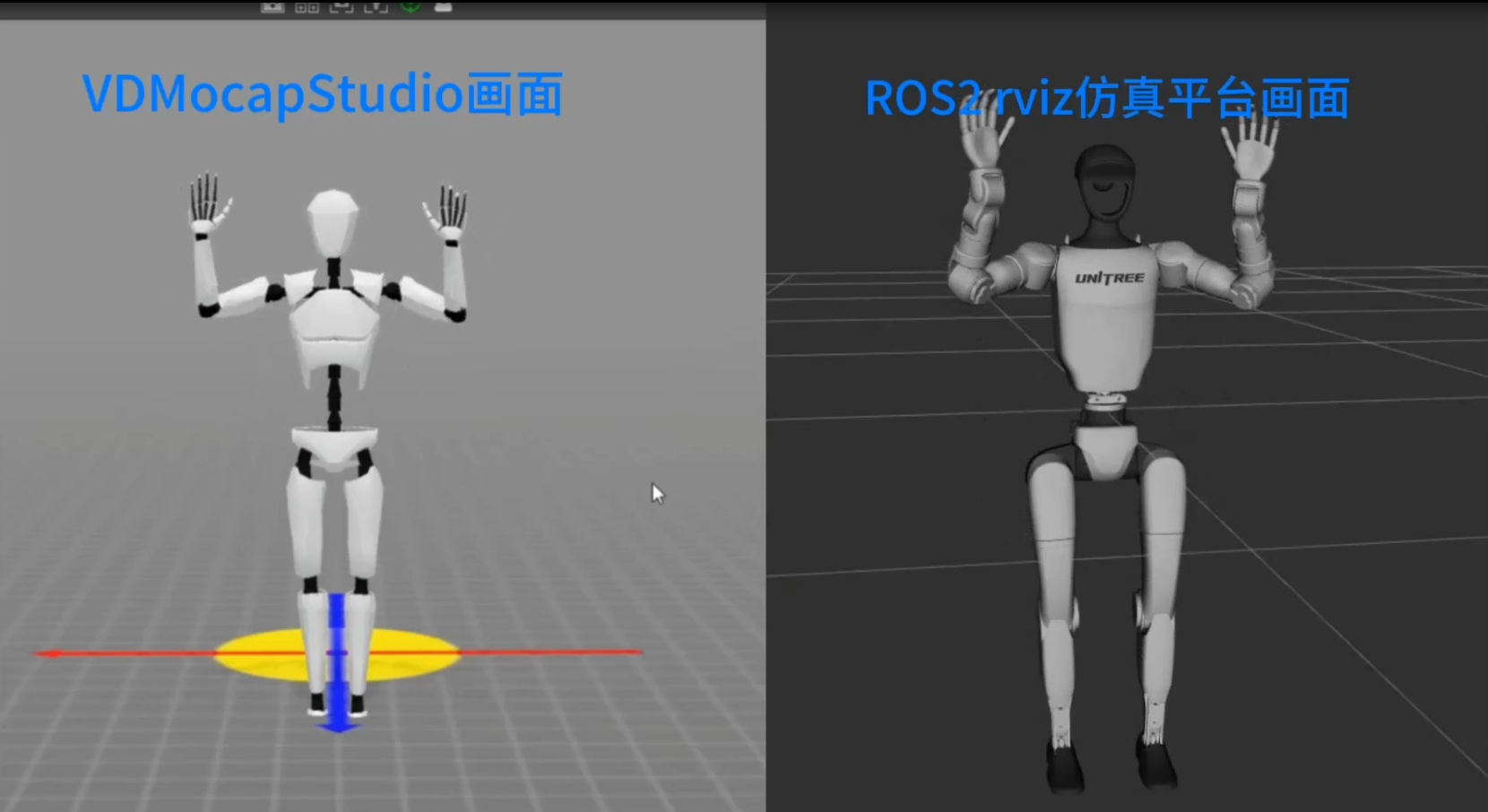
Ready-to-use plugins/scripts for Isaac Sim, MuJoCo, and RViz to drive the simulated robots with live or recorded data. |
Skip writing custom sim interfaces. Focus on control algorithms and training. |
|
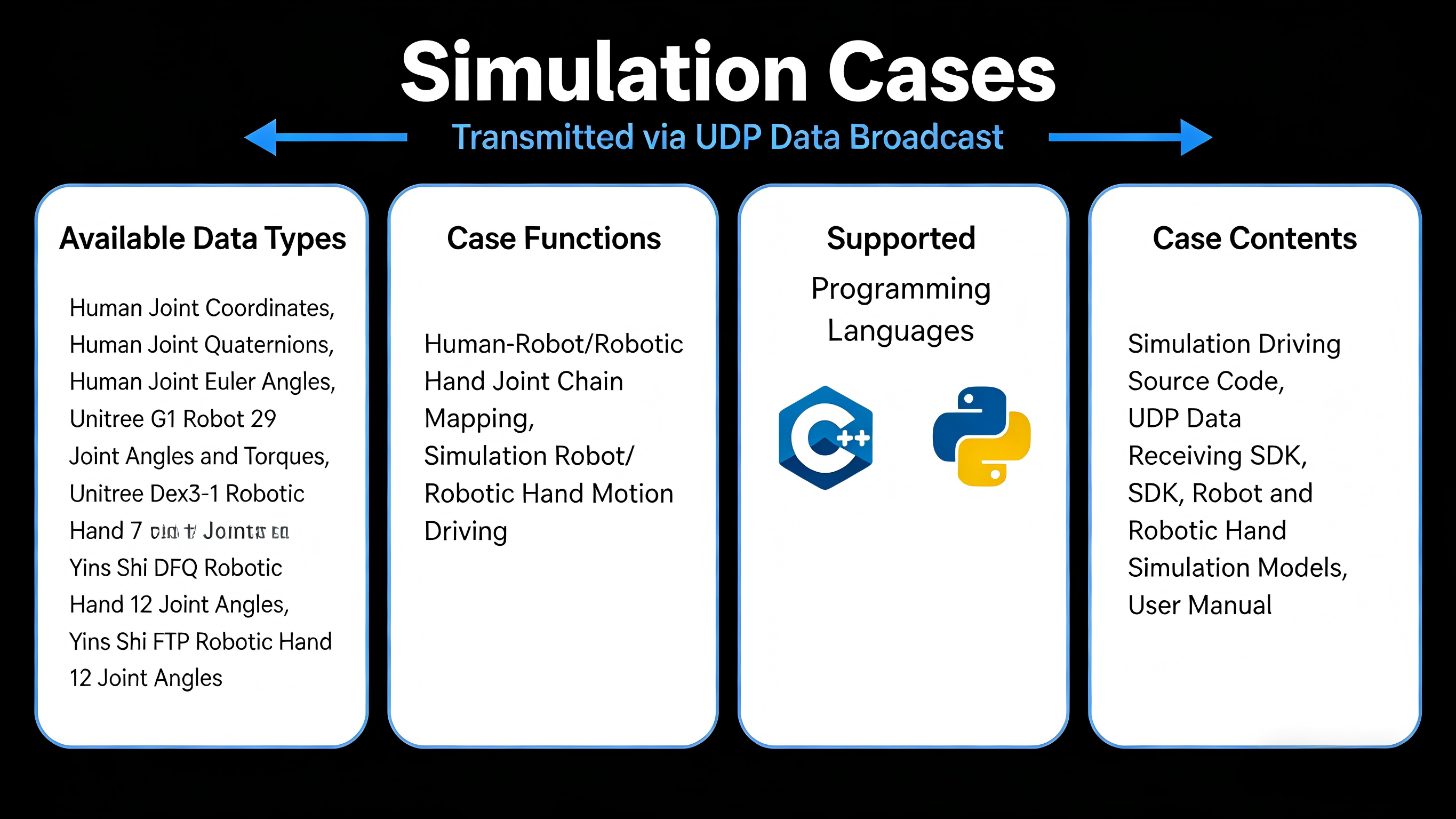
Comprehensive Data Output |
Live stream includes 3D joint positions, quaternions, and Euler angles for full biomechanical fidelity. |
Gain maximum flexibility for different control inputs and learning methods. |
| Full Documentation & Examples | Step-by-step guides covering setup, calibration, data mapping, and example training scenarios. | Reduce learning curve and onboarding time for your entire team. |
Seamless Hardware & Software Ecosystem
-
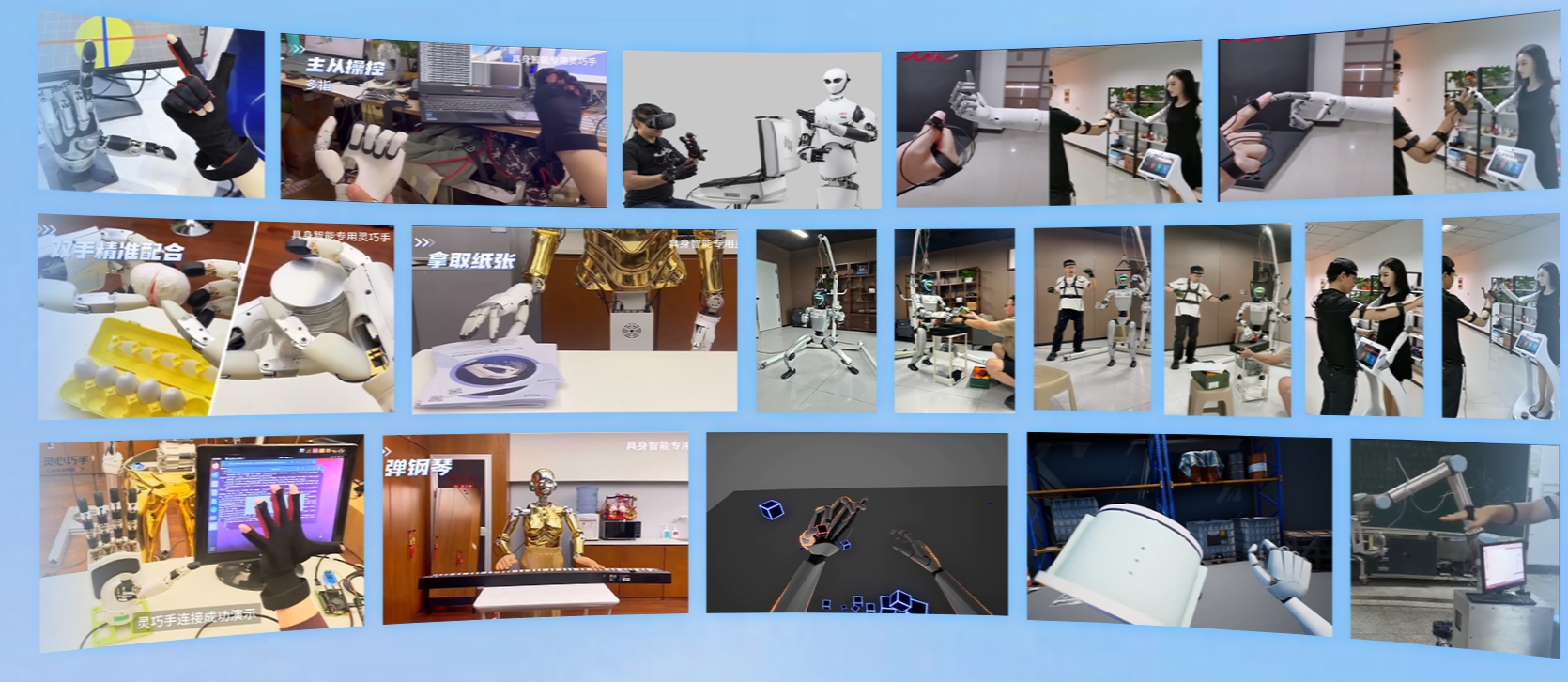
Full Hardware Compatibility: Works seamlessly with VDSuit Full (body), DreamsCap X1 (upper body/head), and MHand Pro (hands) for capturing complete human performance.
-
Universal Data Transport: Motion data is broadcast via UDP on your local network—a simple, standard, and firewall-friendly protocol for real-time streaming.
-
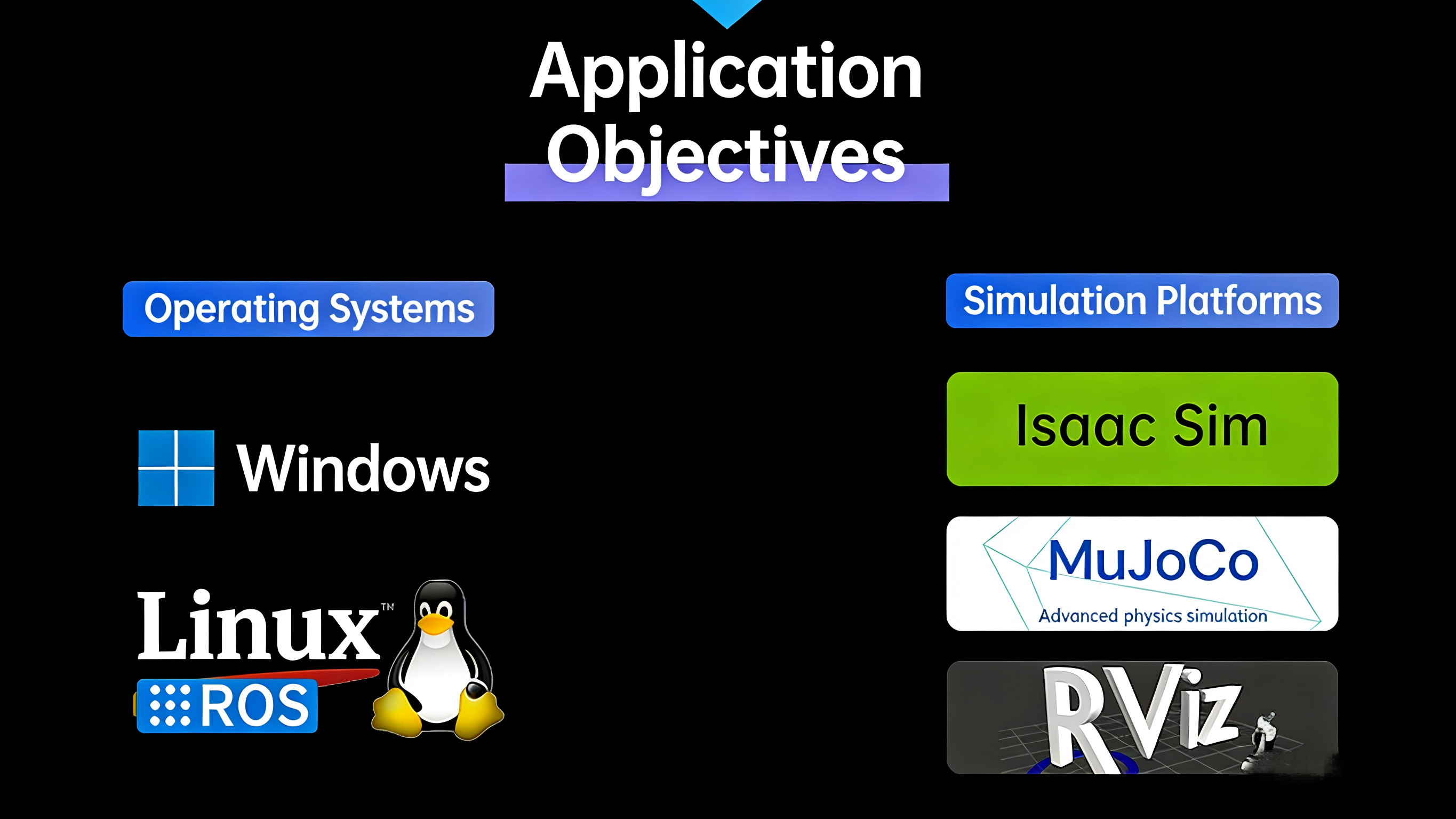
Cross-Platform Support: The provided SDKs and scripts support both Windows and Linux (ROS1/ROS2) environments.
-
Leading Simulator Ready: Out-of-the-box support for NVIDIA Isaac Sim (for high-fidelity RL training), MuJoCo (for fast physics simulation), and RViz (for visualization in ROS).
Core Applications: What Can You Build?
-
Imitation Learning Pipelines: Record expert human demonstrations with our suits and directly train robot policies in simulation.
-
Controller Prototyping & Stress Testing: Test new walking or grasping controllers against diverse human motion data before deploying on costly hardware.
-
Human-Robot Interaction (HRI) Studies: Simulate safe and natural interaction scenarios using realistic human motion proxies.
-
Digital Twin Development: Create a real-time synchronized digital twin of a human operator controlling a remote robot or avatar.

Technical Specifications & Requirements
Performance Demonstration

Virdyn Robot Partners

Buy NOW
Products categories
-
Motion Capture&Vtuber Livestream: Turn in...
-

Full Body Motion Capture Accessories for Suit Hub
-

Virdyn mHand Studio Motion Capture Gloves Softw...
-

AH Camera-Based Face Capture Helmet With HD 108...
-

VDCap Full Performance Capture Entry-Level Moti...
-

Motion Capture Provides Advanced Technology Too...





