FPV の自己中心的なデータ収集が簡単に! VDEgo-C2 & C4 プレセールはライブ中です

この商品は正常にカートに追加されました!
VDRobot Studio: ロボット工学向けモーション データ収集&変換プラットフォーム |ヴァーディン



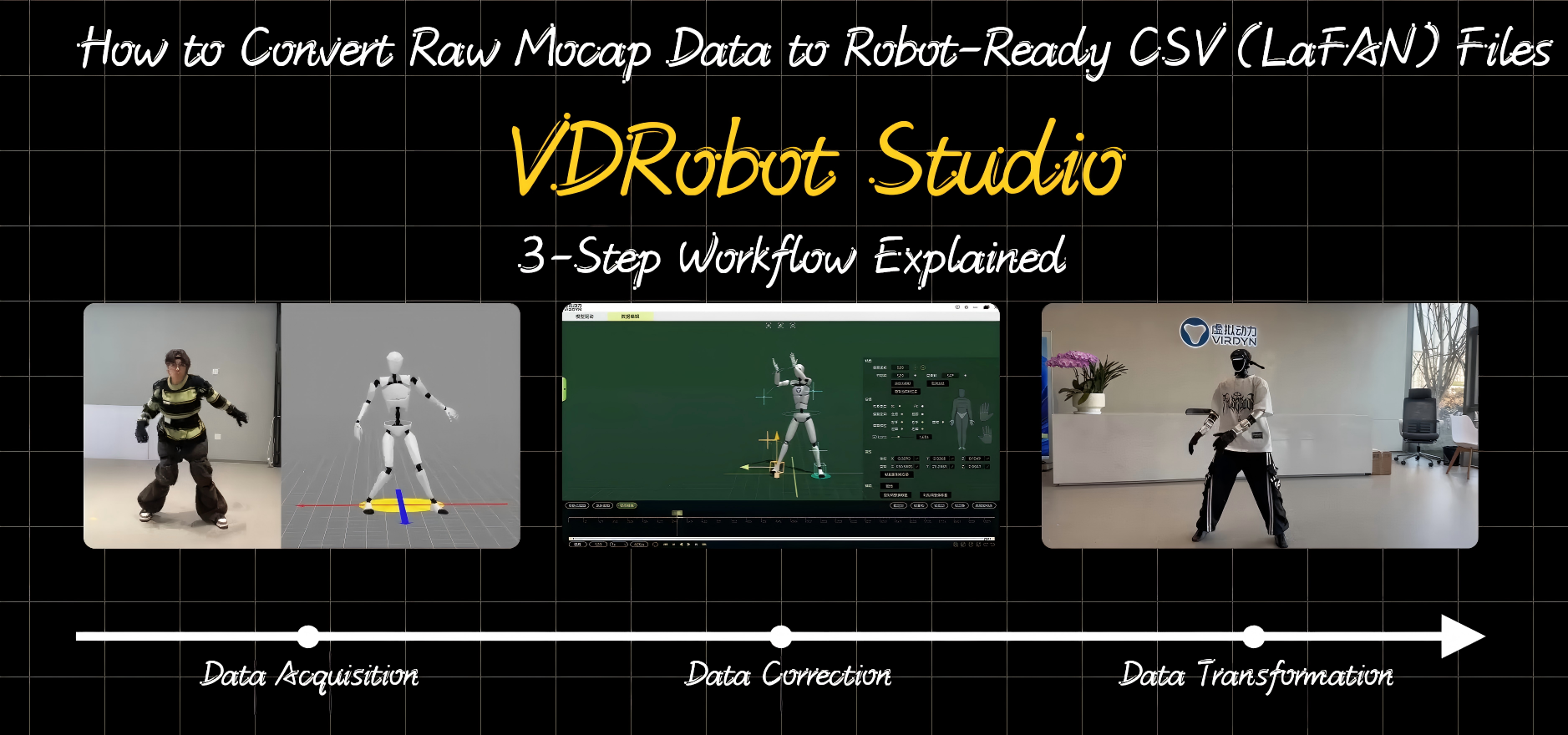
Raw キャプチャからロボット対応コマンドまでを 1 つのプラットフォームで実行
モーション データのクリーニング、編集、再ターゲットのために複数のソフトウェア ツールをやりくりする必要はもうありません。VDロボットスタジオは、生の人間のモーション キャプチャをロボットの正確で展開可能な軌道に変換するために特別に設計された統合ソフトウェア プラットフォームです。ワークフローを合理化し、運動学的精度を確保し、コンセプトから実行までを加速します。
ロボット開発における重大なギャップ: モーション データの変換
人間の動きを捉えることは最初のステップにすぎません。本当の課題は、翻訳- そのデータを、特定のロボットが実行できるクリーンで実行可能なコマンドに変換します。クリーニング、再ターゲット、エクスポート用のツールが切断されていると、ボトルネック、エラー、非効率が生じます。
VDRobot Studio は、統合されたロボット中心の環境キャプチャ後のパイプライン全体に適用されます。

コア プラットフォーム機能: 統合されたワークフロー
当社のプラットフォームは、キャプチャと制御の間の重要なステップをシームレスなプロセスに統合します。
|
ワークフローステージ |
VDRobot Studio のソリューション |
あなたの利益 |
|
1.インポートとクリーンアップ |
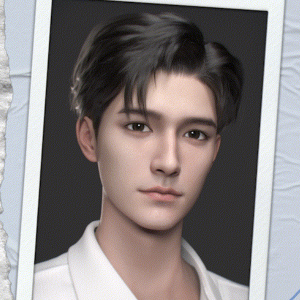
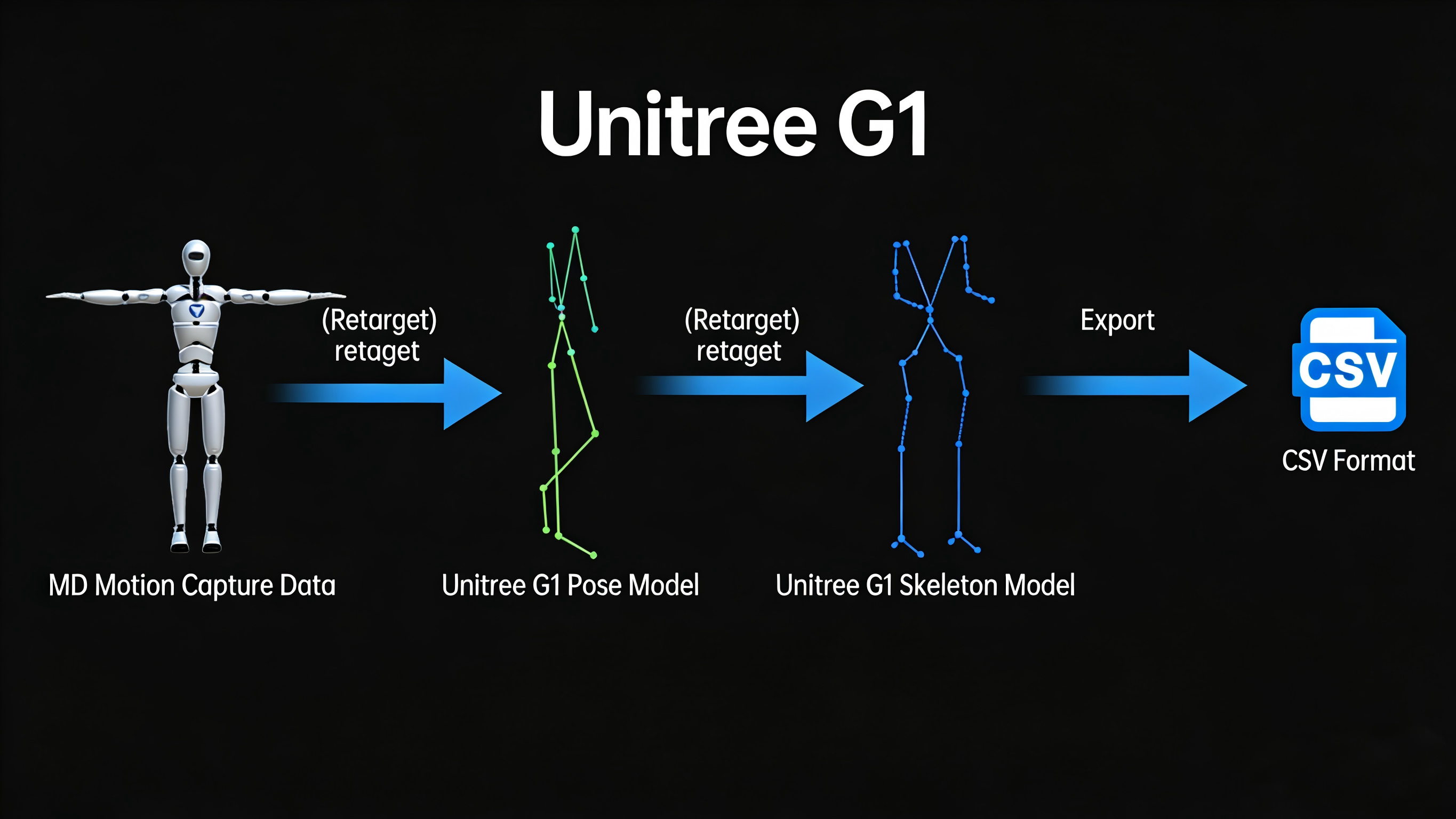
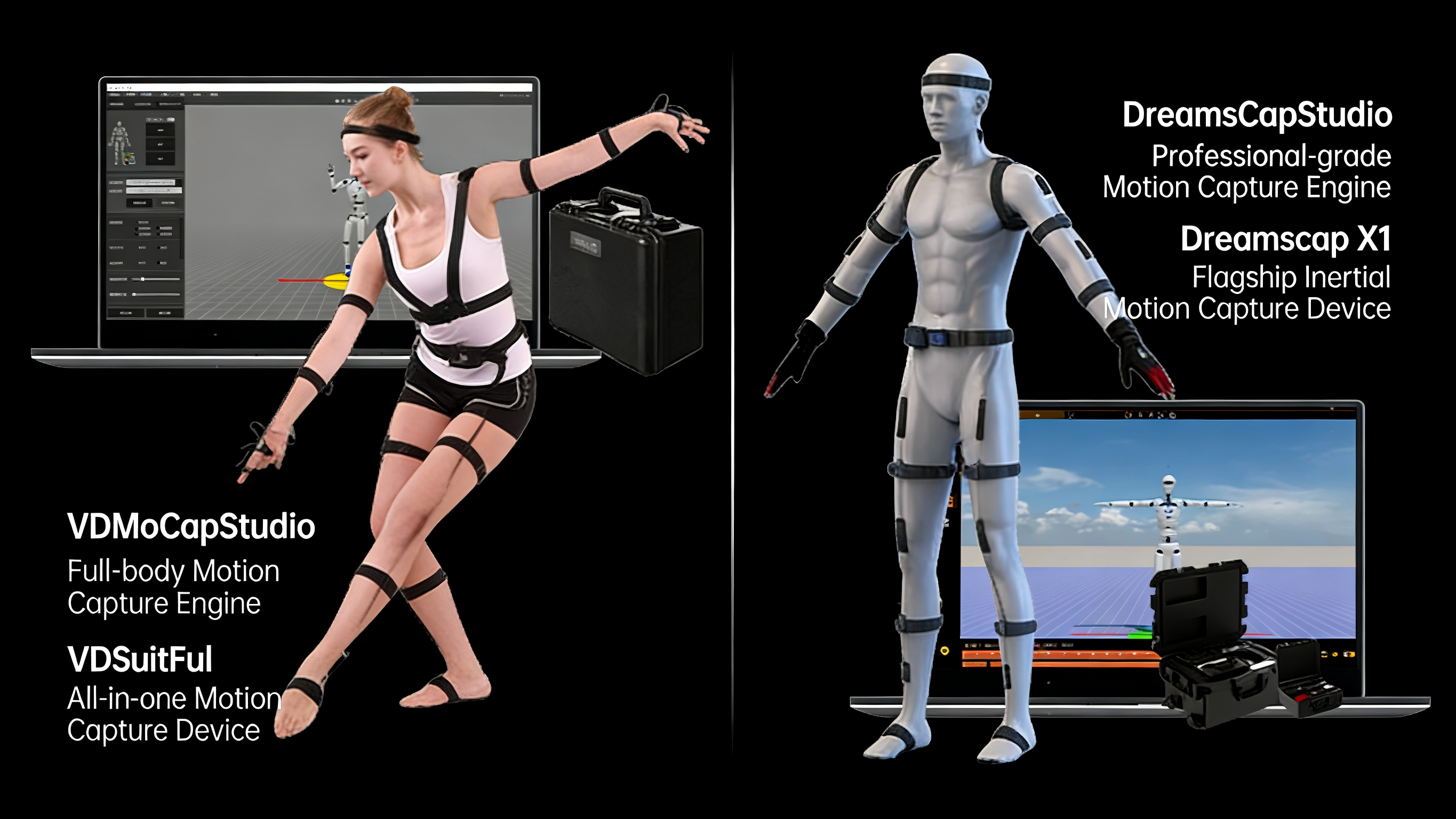
生データ ストリームを直接取り込むVDスーツフルまたはドリームキャップX1。自動フィルターと手動フィルターを適用して、センサーのノイズとジッターを除去します。 |
初期のデータ基盤から始めて、手動クリーンアップにかかる時間を節約します。 |
|
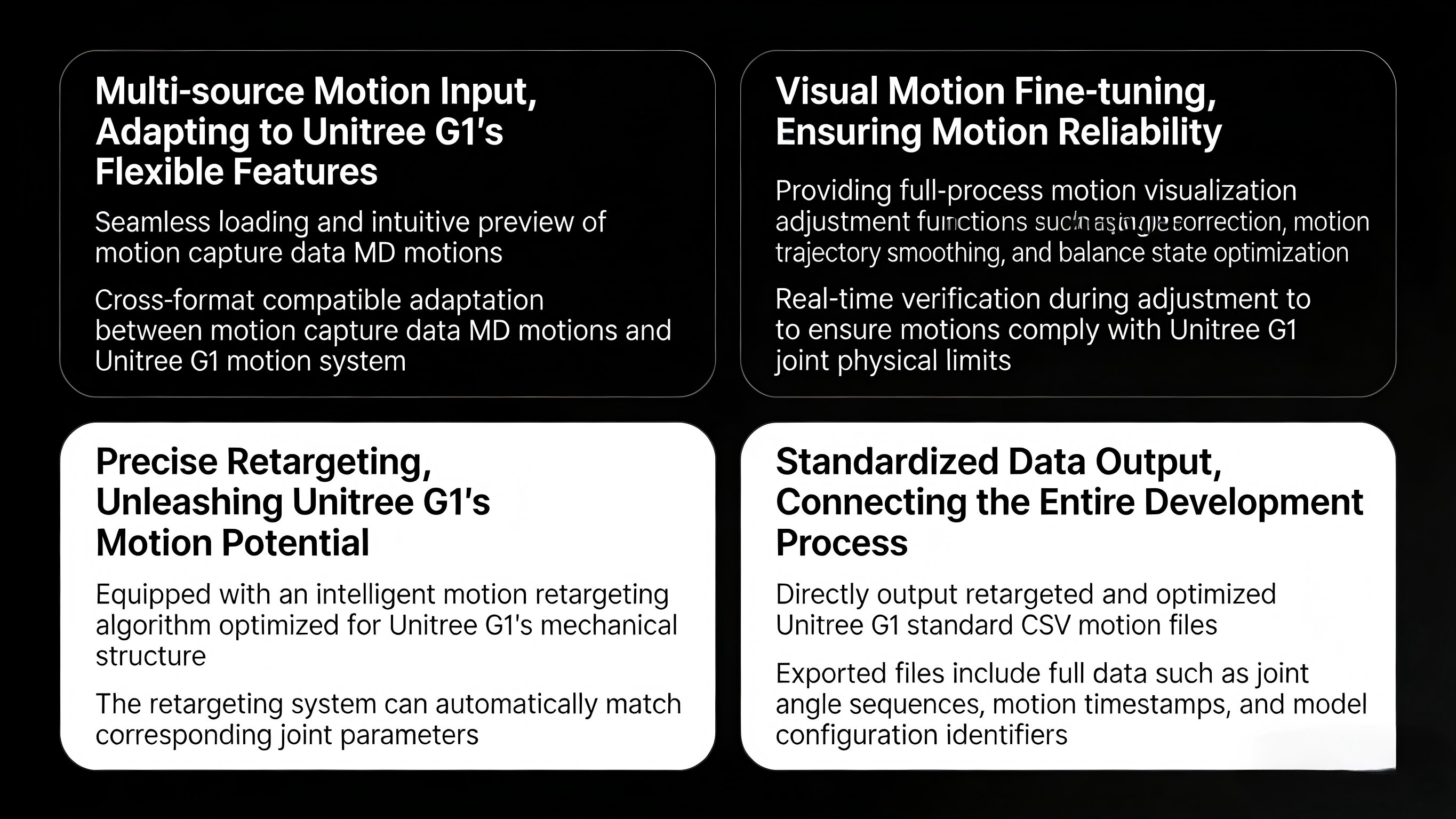
2. リターゲットとマップ |
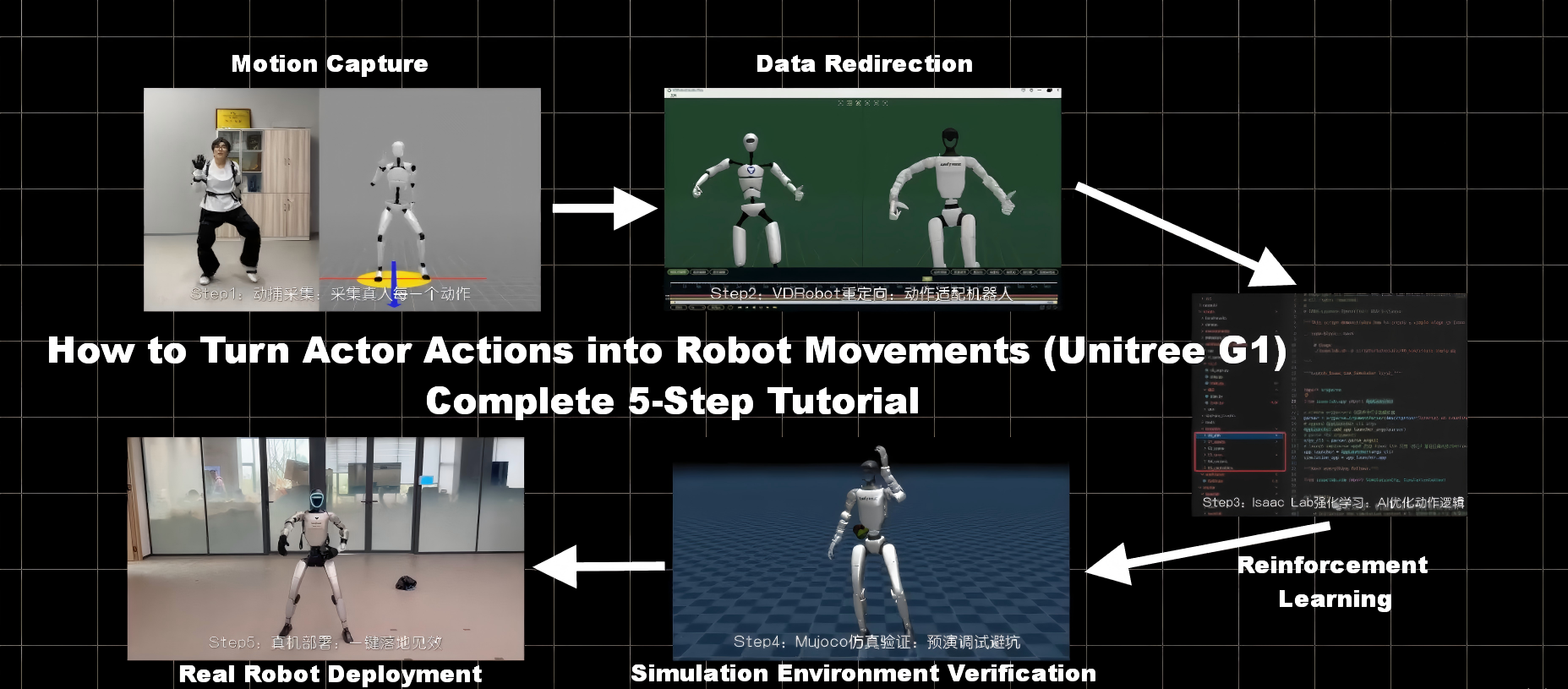
組み込みの事前設定されたリグを利用して、ユニツリーG1および他のプラットフォーム。直感的なツールを使用して、人間の関節データをロボットの運動連鎖に視覚的にマッピングします。 |
モーションが物理的に実現可能であり、正確なハードウェアに対して生体力学的に健全であることを確認します。 |
|
3. 編集と微調整 |
包括的なキーフレーム エディタを使用して、タイミングの調整、スプラインの滑らかさ、フット スケートの修正、ポーズの修正を行います。再撮影なしで完璧なモーション。 |
創造的かつ技術的に完全に制御して、思い描いた通りのロボットの動作を作成します。 |
|
4. 検証とエクスポート |
簡素化されたビューアでリターゲットされたモーションをプレビューします。最終軌道を業界標準としてエクスポートCSVファイル、ロボットのコントローラーまたはシミュレーターの準備が整いました。 |
信頼性と互換性を実現し、スタックへの即時統合を可能にします。 |
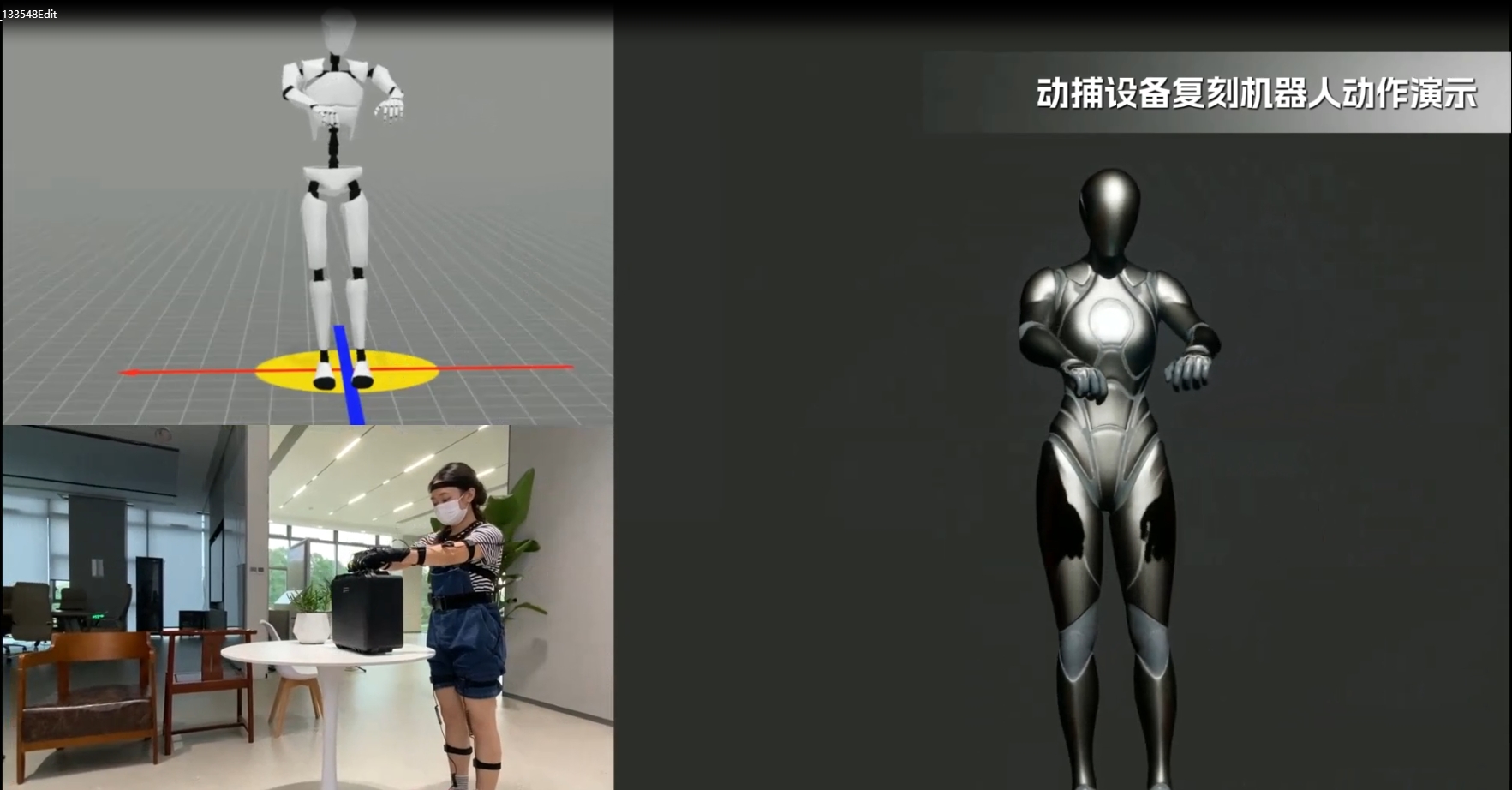
VDRobot Studio Demo Performance
シームレスなハードウェア統合を実現する設計
VDRobot Studio は Virdyn エコシステムの中心頭脳として設計されており、プラグ アンド プレイの互換性を提供します。
-
Virdyn ハードウェア向けに最適化:Studio と弊社のVDスーツフル(全身キャプチャの場合) またはドリームキャップ X1ヘッドセット (上半身およびモバイル キャプチャ用)。
-
Unitree G1 用に構築:プリロードされたモデルとリターゲット プリセットを備えています。ユニツリーG1、セットアップ時間と技術的オーバーヘッドを大幅に削減します。
-
オープン出力形式:クリーンな状態でタイムスタンプ付きでエクスポートしますCSV関節の位置、速度、またはトルクを含むファイル。この不可知論的な形式により、ROS、MATLAB、Python、および独自の制御システムとの互換性が保証されます。
VDRobot Studio は誰に適していますか?
-
ロボット工学研究所:模倣学習と制御ポリシーのトレーニングのために実験的な動作データを迅速に処理します。
-
アニメーションおよびゲーム開発者:ライブ俳優のパフォーマンスをロボットまたは CGI モデルにリターゲットすることで、リアルな NPC またはキャラクター アニメーションを作成します。
-
人型ロボット企業:ダンサー/俳優のパフォーマンスを製品機能のデモンストレーションに変換するため、信頼性が高く反復可能なソフトウェア パイプラインを確立します。
-
デジタル コンテンツ クリエイター:アクセスしやすいオールインワン ツールを使用して、映画、テレビ、ソーシャル メディア向けの高品質なロボット モーション コンテンツを作成します。
VDRobot Studio の詳細パラメータ
| VDRobotStudio システムパラメータ | ||||
| データインポート | モーション キャプチャ データ ファイル (.md/.mdm)、3D アニメーション データ ファイル (.fpx/.bvh)、およびロボット強化学習データセット (.csv(lafan)) のインポートをサポートします。 | |||
| データのエクスポート | ロボット強化学習データセット (.csv(lafan))、3D アニメーション データ ファイル (.fpx/.bvh)、およびプレーン テキスト ファイル (.csv) のエクスポートをサポートします。現時点では、器用な手を含まない人型ロボット (Unitree G1 など) のみをサポートしています。 | |||
| データの再生 | 再生/一時停止、速度調整、ループ再生、タイムラインのズーム、ドラッグなどのアニメーション再生制御コンポーネントを提供します。正確な位置決めのため、開始フレーム、終了フレーム、および現在のフレーム値の直接入力をサポートします。 | |||
| データドリブンのビジュアライゼーション | 左画面にはモーションキャプチャデータによって駆動されたモーションキャプチャモデルが表示され、右画面には強化学習データによって駆動されたロボットモデルが表示され、駆動効果を正確に比較できます。 | |||
| マウスホバーのツールチップ | マウスホバーツールチップ: 一部のシステム機能には注釈が付けられています。マウスを機能ボタン、入力ボックス、またはタイトルの上に約 1 秒間置くと、システムは関連するテキストの説明を表示します。 | |||
| モデルの切り替え | 標準モーション キャプチャ モデルとスケルタル ポイント モデル(アダプティブ モーション キャプチャ データ スケルトン)を内蔵 器用な手を含む人型ロボットモデル(Unitree G1など)を除く |
|||
| ポーズ編集 | キーフレームのポーズを修正し、開始から終了の範囲に従ってデータをバッチ変更して、関節角度を修正し、モーションの品質を向上させます。 IK と FK の両方のコンストレイント モードを提供し、コア ボディ ジョイントの位置と回転の調整、組み込みの補間トランジション コントロール、フレーム フリーズ比較、ポーズ/調整オフセットのコピー アンド ペースト、ワンクリックの接地などをサポートし、シンプルかつ効率的なポーズ編集を保証します。 ポーズ編集は指関節の調整には対応していません。 |
|||
| 連絡先の編集 | 足と地面の接触状態を補正し、2次IK-FKを実行して滑りを補正し、ポーズを安定させます。接触セグメントの視覚的なマーキング、境界調整、分割/マージ/作成、再ドライブ、元に戻す/やり直しなどを提供します。 | |||
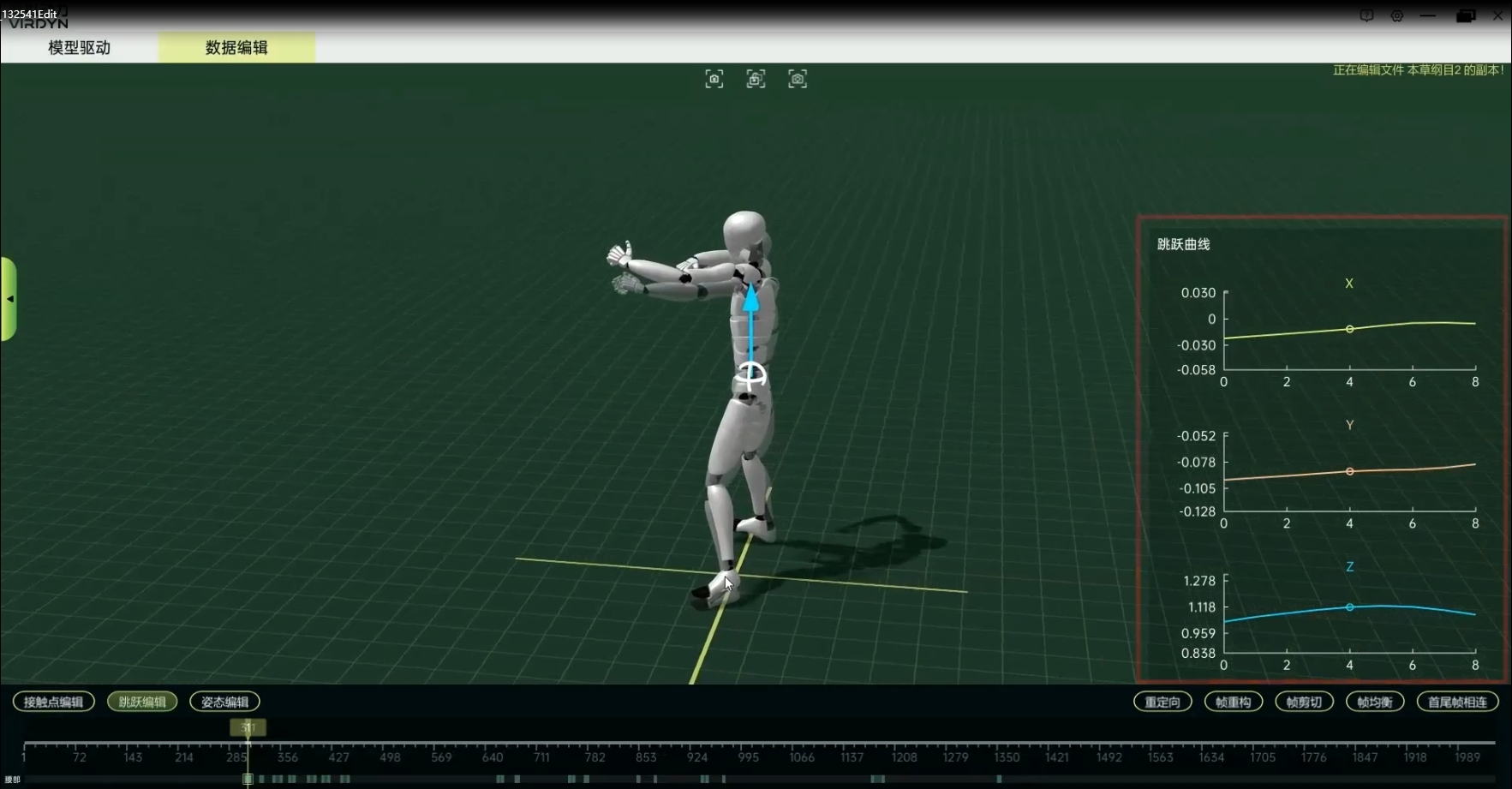
| ジャンプ編集 | ジャンプ中の変位を修正し、その後の変位を変換して不正確な離陸/着地を修正し、ジャンプの品質を向上させます。ジャンプ セグメント データの視覚化、ジャンプの高さと着地点のドラッグ、ジャンプ放物線の再構築、元に戻す/やり直し、その他の機能を提供します。 | |||
| システム画面の操作 | マウスの左ボタンで画面を移動し、マウスの右ボタンで画面を回転し、スクロール ホイールで画面をズームします。 | |||
| ポーズ編集のローカル変換プレビュー | ポーズ編集中に、選択したフレーム範囲内で右クリックすると「ローカル変換」がトリガーされ、編集アルゴリズムによって生成された中間効果のリアルタイム プレビューが表示され、データセット全体を再生成することなく、迅速な検証と反復が容易になります。 | |||
| ショートカットキーの設定 | ショートカット キー設定を表示し、カスタム ショートカット キーをサポートします。 | |||
| モーションステッチ | 少なくとも 2 つのモーション データ セットをつなぎ合わせます。 | |||
| 速度調整 | 現在のモーション キャプチャ データの長さを調整して、より速い/より遅い再生効果を実現します。 | |||
| フレーム再構築 | 現在のモーション キャプチャ データのフレーム レートを再構築します。 | |||
| リダイレクト | 現在のモーション キャプチャ データを現在のモデルにリダイレクトします。 | |||
| フレームイコライゼーション | リアルタイムに基づいてデータ フレームを完成し、時間間隔に従ってデータを均等化します。たとえば、60fps データの場合、1 秒あたり 60 フレームが完了します。 | |||
| フレームクリッピング | フレームクリッピング 連続したフレームシーケンスに対してセグメンテーション/クロップ/フラグメンテーション処理を実行します。 | |||
| データ再生フレームレート設定 | データ再生時のフレームレートを手動で設定できます。 | |||
| 最初と最後のフレームの連結 | 最初のフレームと最後のフレームの間の位置と姿勢の違いを排除し、閉ループ データ構造を作成します。 | |||
| 節約 | 編集データを一時保存する場合、元のファイルを上書きせずに、ファイル名のバージョン番号(xxx.V2/3/4…)を自動生成して保存します。 | |||
| 名前を付けて保存 | 最新データを指定ディレクトリに.md/.mdm形式で保存します。 | |||
| オーディオをインポートする | 外部オーディオ ファイルのインポートをサポートし、モーションとオーディオのリズム マッチングのための同期支援を提供します。 | |||
| ビデオのインポート | 外部ビデオ ファイルのインポートをサポートし、実写映像とのモーション マッチングの同期支援を提供します。 | |||
| カメラ追跡 | 選択したモデルをカメラビューで自動的に追跡します。 | |||
| シングルビュー | モーション キャプチャ データ駆動型のエフェクトを表示します。 | |||
| デュアルビュー | モーション キャプチャ データ駆動型エフェクトとロボット データ駆動型エフェクトの両方を表示します。 | |||
| カメラの同期 | デュアルビューパースペクティブ同期制御。 | |||
| カメラのリセット | カメラの視点をリセットします。 | |||
| オンラインアップデート | オンライン更新、バージョン更新コンテンツの表示、バージョンのロールバックをサポートします。 | |||
| 言語の切り替え | 中国語と英語の切り替えをサポートします。 | |||
| 垂直同期 | 画面のティアリングを最適化できます。ただし、ソフトウェアのフレーム レートがロックされるため、グラフィック カードのパフォーマンスに対する要求が高くなります。 | |||
| 標準的なシステム画面の操作: | マウスの左ボタンで画面を移動し、マウスの右ボタンで画面を回転し、ホイールをスクロールして画面をズームします。 | |||
| データのエクスポート | 「.csv (lafan)」は、Unitree 3 本指力制御器用ハンドや時間ベースの 5 本指器用ハンドなどの器用なハンドを含む人型ロボットをサポートします。.bvh (lafan) 形式のファイルのエクスポートを追加しました。このファイルは骨格データ構造に基づいており、3D アニメーション ソフトウェアにインポートして表示できます。この形式は、研究開発担当者に低レベルのデータ インターフェイスも提供し、特定のロボット モデル向けにカスタマイズされたモーション リダイレクション アルゴリズムの開発を可能にし、最終的には要件を満たす強化学習データセットに変換します。 | |||
| ロボットのモーションデータのリダイレクト | ロボットのスケルトンに基づいて、現在ロードされているモーション キャプチャ データをリダイレクトし、スケルトンの問題によって引き起こされるリファイン結果の不一致を効果的に回避します。 | |||
| モデルの切り替え | 器用ハンドを含む人型ロボットモデル(Unitree G1、Unitree 3 本指力制御器用ハンド、時間ベース器用ハンドなど)を含みます。 | |||
| ポーズ編集 | 指の関節の調整をサポートします。 | |||
パフォーマンスデモンストレーション
プラットフォーム操作の概要
Virdyn ロボットパートナーズ

今すぐ購入
ここにメッセージを書いて、私たちにそれを送ります